Коротко энкодеры можно назвать преобразователями угловых перемещений. Они служат для модификации угла поворота объекта вращения, например, вала какого-либо механизма, в сигнал электрического тока. При этом определяется не только угол поворота вала, но и его направление вращения, а также скорость вращения и текущая позиция относительно первоначального положения.
Коротко энкодеры можно назвать преобразователями угловых перемещений. Они служат для модификации угла поворота объекта вращения, например, вала какого-либо механизма, в сигнал электрического тока. При этом определяется не только угол поворота вала, но и его направление вращения, а также скорость вращения и текущая позиция относительно первоначального положения.
Наиболее популярными энкодеры стали при их использовании в системах точного перемещения, на станкостроительных заводах, в производственных комплексах с применением робототехники, в измерительных устройствах, в которых необходима регистрация точных измерений наклонов, поворотов, вращений и углов.
Виды и принцип действия

Энкодеры – это датчики поворота. Простейший датчик имеет ручку, которая может поворачиваться по часовой стрелке или против нее. В зависимости от угла поворота и направления выдается цифровой сигнал, информирующий о том, в каком положении находится ручка, либо в какую сторону она была повернута.
У такого энкодера, показанного на рисунке, ручка также может применяться в качестве кнопки. Это является вспомогательной функцией конкретного вида энкодера.
По типу выдаваемых данных энкодеры делятся на две большие группы:
- Абсолютные.
- Инкрементальные.
Абсолютные энкодеры
Если вал энкодера поворачивать в другую сторону, то он начнет выдавать противоположные значения. В нашем случае у него используется пять выводов для выдачи значений поворота.
У данного алгоритма имеются свои недостатки. Из таблицы 1 виден порядок выдаваемых значений n-го энкодера. Стоит обратить внимание на две последние строчки, переход от 127 на 128.
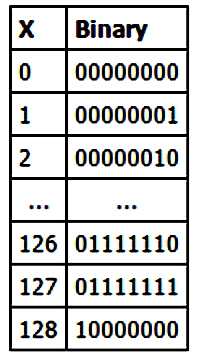
Таблица 1
Здесь меняются абсолютно все биты. В идеальном энкодере они все меняются одновременно и нет никаких проблем. Практически в реальном энкодере биты меняются быстро, однако не одновременно. И в какой-то момент на выходе энкодера оказывается совершенно произвольное значение. Так как меняются все биты, следовательно, у энкодера будет произвольное значение от нуля до всех единиц.
Справа изображен пример такого переключения. Чем это может грозить? Разберем пример. Микроконтроллер с помощью двигателя управляет валом и поворачивает его на определенный угол. В определенный момент при переключении со 127 на 128 ячейку он получает определенное случайное значение. Контроллер делает вывод, что вал находится совершенно в другом месте, в отличие от фактического места, и начинает его вращать в другую сторону, с другой скоростью и т.д.
Через определенное время микроконтроллер получает правильное значение, начинает пытаться остановить вал и вращать его в правильную сторону. Такой процесс может продолжаться долго, при условии, что такая ошибка будет встречаться часто. Такие ошибки являются нерегулярными, и вычислить их достаточно сложно.
Код Грея
Выше описанная проблема решается с помощью введения кода Грея. Особенностью кода Грея является то, что при переключении энкодера на единицу, значение кода Грея меняется также на единицу. Меняется только один вид. Это видно в таблице 2 в сравнении двоичного кода и кода Грея.
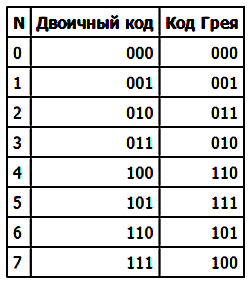
Таблица 2
Первые две строчки совпадают, но уже во второй строчке поменялся средний бит. Далее также меняется один бит. Также стоит отметить, что последний и первый код Грея отличается на один бит, то есть код Грея может зациклиться.
Преимуществом данного кода является то, что ошибка, которая рассмотрена выше, невозможна. Из недостатков можно отметить, что микроконтроллеру необходимо переводить код Грея в двоичный код для того, чтобы понять, в каком положении находится абсолютный энкодер.
Инкрементальные энкодеры
Следующим типом является инкрементальный энкодер, который имеет более простую структуру. Но при этом он не показывает конкретное место положения своей ручки. Он показывает только направление поворота, а число делений поворота должен считать микроконтроллер.
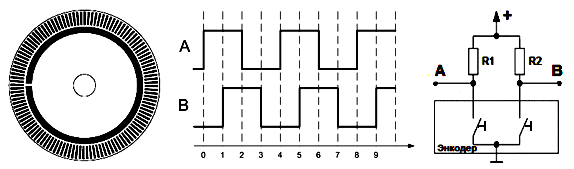
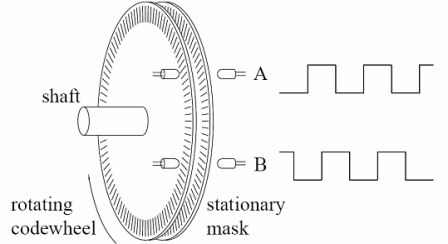
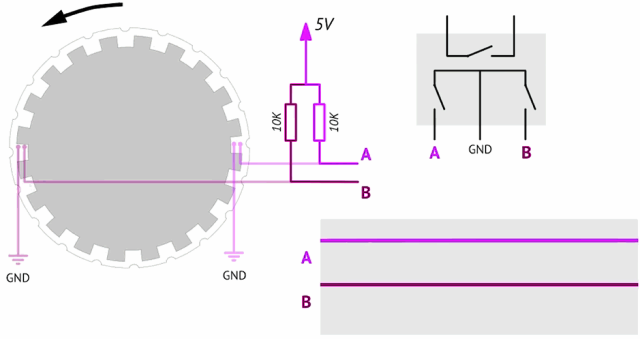
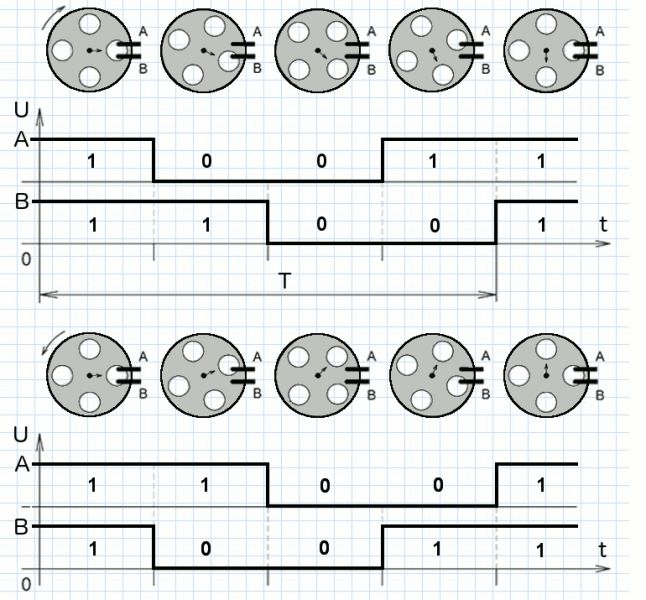
У инкрементального энкодера есть набор полосок, которые по умолчанию подключены к земле, и при повороте они замыкаются и размыкаются. Получается сигнал, изображенный на рисунке (похож на меандр). Таких круговых полосок у энкодера две. Полоски смещены на одну четверть, и сигналы также смещены между собой на четверть. Это важно, так как позволяет определить направление вращения.
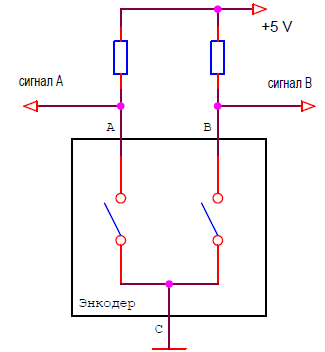
Схему инкрементального энкодера можно представить по правому рисунку. Кнопки обозначают периодические подключения энкодера к земле. Так как внутри энкодер не подключается к логической единице, то необходимо снаружи самостоятельно подтянуть логические единицы через резисторы к выводу энкодера. В этом случае, когда ни одна из ножек у энкодера не подключена к земле, на ножках будет логическая единица.
Если энкодер подключил к земле какую-то ножку, то на этой ножке будет логический ноль. В спокойном состоянии у энкодера на выходе логическая единица. При начале вращения энкодера в любую сторону, то сначала один вывод подключается к земле, затем другой. Далее эти выводы по очереди отключаются от земли, и на них опять образуется логическая единица.
Определить направление поворота можно по тому, какой из выводов раньше подключился к земле. При подсчете полных циклов можно посчитать количество щелчков поворота энкодера.
Фактически у энкодера имеется четыре состояния:
- Две единицы.
- Ноль и единица.
- Ноль и ноль.
- Единица и ноль.
Три состояния, которые не равны единицам, являются неустойчивыми, и в них энкодер не может находиться. Во многих микроконтроллерах реализована функция подсчета поворотов с помощью таймеров, у которых есть определенные входы. Таймер считает на аппаратном уровне, на сколько щелчков и в какую сторону был повернут энкодер, и выдает значение. То есть, счетчик инкрементирует какое-либо число.
По изменению этого числа можно определить, на сколько щелчков был повернут энкодер. По количеству щелчков можно определить и угол поворота. Энкодер также имеет дребезг контактов, который усложняет анализ сигналов.
Оптические энкодеры
Подобный преобразователь выполнен в виде диска, зафиксированного на валу, и изготовленного из стекла. Оптический датчик поворота отличается от других видов дополнительным оптическим растором, перемещаемым при повороте вала. При этом он превращает момент вращения в световой поток, который далее принимается фотодатчиком.
Оптический преобразователь запоминает углы вращения. При этом каждому отдельному положению соответствует особый цифровой код, который вместе с числом оборотов образует единицу измерения датчика. Энкодер подключается и работает по аналогии с инкрементальным датчиком.
По характеру функционирования они разделяются на фотоэлектрические и магнитные . Принцип работы магнитных основан на использовании эффекта Холла, который был впервые открыт в 1879 году. При этом разность потенциалов появляется только при расположении провода постоянного тока в магнитное поле.
По точности и свойствам разрешения магнитный вид датчика уступает фотоэлектрическому, однако по конструкции он проще, менее требователен к условиям работы и пространству. Магнитный энкодер является прибором, который фиксирует прохождение магнитного полюса магнита при вращении, находящегося рядом с чувствительным элементом. Информация передатчика выражается в цифровом коде.
Фотоэлектрический энкодер является датчиком, работающим на основе фотоэлектрического принципа. Этот эффект наблюдается при воздействии светового потока на вещество. Этот принцип был открыт в 1887 году. При эксплуатации такого датчика происходит постоянное преобразование луча света в сигнал электрического тока.
Аналогами фотоэлектрического энкодера являются оптоэлектронный, оптический и оптронный. Эти датчики наиболее чувствительны к характеристикам изготовления, эксплуатации и другим факторам, по сравнению с другими моделями. Однако это оправдывается их повышенной точностью, в отличие от конкурентов.
Поскольку информация, выраженная в Грей-коде, имеет чисто кодированный характер не несущей реальной числовой информации, должен он перед дальнейшей обработкой сперва преобразован в стандартный бинарный код. Осуществляется это при помощи преобразователя кода (декодера Грей-Бинар), который к счастью легко реализируется с помощью цепи из логических элементов «исключающее или» ( XOR ) как программным, так и аппаратным способом (см. схему ниже).

Цена: по запросу
Товар добавлен в корзину.
Энкодер / преобразователь угловых перемещений — устройство, предназначенное для преобразования угла поворота вращающегося объекта (вала) в электрические сигналы, позволяющие определить угол его поворота.
Широко применяются в промышленности.
Энкодеры подразделяются на инкрементальные и абсолютные, которые могут достигать очень высокого разрешения.
Инкрементальный энкодер выдает за один оборот определенное количество импульсов. А абсолютные энкодеры позволяют в любой момент времени знать текущий угол поворота оси, в том числе и после пропадания и восстановления питания. А многооборотные абсолютные энкодеры, кроме того, также подсчитывают и запоминают количество полных оборотов оси.
Энкодеры могут быть как оптические, резисторные, так и магнитные и могут работать через шинные интерфейсы или промышленную сеть.
Преобразователи угол-код практически полностью вытеснили применение сельсинов.
Инкрементальные энкодеры
Абсолютные энкодеры
Абсолютные энкодеры, как оптические, так и магнитные имеют своей основной рабочей характеристикой число шагов, то есть уникальных кодов на оборот и количество таких оборотов, при этом не требуется первичной установки и инициализации датчика. Поэтому абсолютные энкодеры не теряют свою позицию при исчезновении напряжения.
Наиболее распространённые типы выходов сигнала — это код Грея, параллельный код, интерфейсы Profibus-DP, CANopen, DeviceNet, SSI, LWL, через которые также осуществляется программирование датчиков.
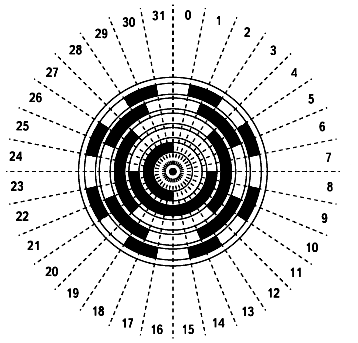
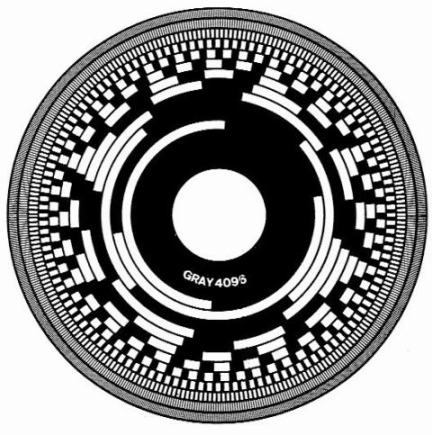
Абсолютный энкодер относится к типу энкодеров, который выполняет уникальный код для каждой позиции вала. В отличие от инкрементного энкодера, счетчик импульсов не нужен,т.к. угол поворота всегда известен. Абсолютный энкодер формирует сигнал как во время вращения, так и в режиме покоя. Диск абсолютного энкодера отличается от диска пошагового энкодера, так как имеет несколько концентрических дорожек. Каждой дорожкой формируется уникальный двоичный код для конкретной позиции вала.
Рис. 1. Кодовый диск абсолютного энкодера
Абсолютный энкодер не теряет своего значения при потере питания и не требует возвращения в начальную позицию. Сигнал абсолютного энкодера не подвержен помехам и для него не требуется точная установка вала. Кроме того, даже если кодированный сигнал не может быть прочитан энкодером если, например, вал вращается слишком быстро, правильный угол вращения будет зарегистрирован, когда скорость вращения уменьшится. Абсолютный энкодер устойчив к вибрациям.
Двоичный код
Двоичный код — это широкораспространенный код, который может обрабатываться непосредственно микропроцессором и является основным кодом для обработки цифровых сигналов. Двоичный код состоит только из 0 и 1.
Построение ДК осуществляется по следующему принципу:
Таким образом выглядит в данном случае число 10 в двоичном коде.
Наибольшее число, которое может быть выражено двоичным кодом, зависит от количества используемых разрядов, т.е. от количества битов в комбинации, выражающей число. Например, для выражения числовых значений от 0 до 7 достаточно иметь 3-разрядный или 3-битовый код:
| числовое значение | двоичный код |
| 0 | 000 |
| 1 | 001 |
| 2 | 010 |
| 3 | 011 |
| 4 | 100 |
| 5 | 101 |
| 6 | 110 |
| 7 | 111 |
Код Грея
Поскольку информация, выраженная в Грей-коде, имеет чисто кодированный характер не несущей реальной числовой информации, должен он перед дальнейшей обработкой сперва преобразован в стандартный бинарный код. Осуществляется это при помощи преобразователя кода (декодера Грей-Бинар), который к счастью легко реализируется с помощью цепи из логических элементов «исключающее или» ( XOR ) как программным, так и аппаратным способом (см. схему ниже).
Из таблицы видно, что при переходе от одного числа к другому (соседнему) лишь один бит информации меняет свое состояние, если число представлено кодом Грея, в то время, как в двоичном коде могут поменять свое состояние несколько бит одновременно. Код Грея — выход, следовательно, он никогда не имеет ошибку чтения и применяется во многих абсолютных энкодерах.
| Десятичный код | Двоичный код | Код Грея |
| 2 3 2 2 2 1 2 0 | ||
| 0 1 2 3 |
0 0 0 0 0 0 0 1 0 0 1 0 0 0 1 1 |
0 0 0 0 0 0 0 1 0 0 1 1 0 0 1 0 |
| 4 5 6 7 |
0 1 0 0 0 1 0 1 0 1 1 0 0 1 1 1 |
0 1 1 0 0 1 1 1 0 1 0 1 0 1 0 0 |
| 8 9 10 11 |
1 0 0 0 1 0 0 1 1 0 1 0 1 0 1 1 |
1 1 0 0 1 1 0 1 1 1 1 1 1 1 1 0 |
| 12 13 14 15 |
1 1 0 0 1 1 0 1 1 1 1 0 1 1 1 1 |
1 0 1 0 1 0 1 1 1 0 0 1 1 0 0 0 |
Биты меняющие свое состояние, при переходе от одного числа к другому, обозначены красным цветом.
Используйте такую схему для преобразования Кода Грея в двоичный код.
Рис. 2. Схема для преобразования Кода Грея в двоичный код
Примечание:
*Код Грея может логически преобразовываться в двоичный код когда терминал Vin подключается к 0 V.
**Инвертор
***Исключающее или
Gray-Excess-Code
Однооборотный энкодер
Однооборотными ( Single — Turn ) датчиками называются датчики, которые выдают абсолютное значения в пределах одного оборота, т.е. в радиусе 360°. После одного оборота код является полностью пройденым и начинается опять с его начального значения. Эти датчики служат, преимущественно, для измерения угла поворота и применяются, например, в антенных системах, эксцентричных коленчатых пресах и т.д.
Рис. 1. Устройство однооборотного энкодера
Многооборотный энкодер
Рис. 2. Устройство многооборотного энкодера
Оптические энкодеры
Магнитные энкодеры
Магнитные энкодеры с высокой точностью регистрируют прохождение магнитных полюсов вращающегося магнитного элемента непосредственно вблизи чувствительного элемента, преобразуя эти данные в соответствующий цифровой код.
Механические и оптические энкодеры с последовательным выходом
Содержат диск из диэлектрика или стекла с нанесёнными выпуклыми, проводящими или непрозрачными участками. Считывание абсолютного угла поворота диска производится линейкой переключателей или контактов в случае механической схемы и линейкой оптронов в случае оптической. Выходные сигналы представляют собой код Грея, позволяющий избавиться от неоднозначности интерпретации сигнала.
Крепление
Имея встроенную систему определения исходного положения, абсолютный поворотный энкодер, по сути, способен обеспечить обратную связь более высокого качества:
Имея встроенную систему определения исходного положения, абсолютный поворотный энкодер, по сути, способен обеспечить обратную связь более высокого качества:
- Более высокое общее разрешение и точность
- Лучшие характеристики по скорости начала работы и выполнению операций в связи с более низким временем возврата в исходное положение
- Точное определение движения вдоль нескольких осей
- Множество промышленных протоколов передачи данных для лучшей интеграции с электроникой и быстродействия
- Лучшее восстановление после сбоев или отключения питания системы
Единственный минус абсолютных датчиков — повышенная сложность системы, что приводит к более высокой стоимости.
Если общая простота системы имеет большее значение, чем функциональность, то абсолютным датчикам есть альтернативы.
Альтернативы абсолютным угловым энкодерам: резольверы, энкодеры с аналоговым выходом, энкодеры с коммутацией, синусно-косинусные энкодеры.
Формула побитного преобразования двоичного кода в код Грея
Как выбрать
Датчики линейного и кругового перемещения
- Перемещение
- Круговое (угловое)
- Линейное.
- Принцип действия
- Оптические, электромагнитные, механические
- Импульсные или непрерывные
- Инкрементальные или абсолютные.
- Разрешение
- Импульсов на оборот (для круговых)
- Миллиметров, микрон (для линейных).
- Круговые датчики
- Вал
- Конструкция вала (цельный, полый)
- Диаметр
- Подшипники (если нужны).
- Вал
- Инкрементальные энкодеры
- Тип выходного сигнала
- TTL 5В (RS-422)
- HTL 8..30В
- Sin/cos 1Vss
- Sin/cos 1Vpp.
- Тип выходного сигнала
- Абсолютные энкодеры
- Тип датчика
- Однооборотные
- Многооборотные.
- Код
- Двоичный
- Грея.
- Тип выходного сигнала
- Синусно-косинусный (резольверы)
- Параллельный
- SSI
- DRIVE-CLiQ
- RS-422 (TTL)
- EnDat
- HIPERFACE
- PROFIBUS DP
- DeviceNet
- CANOpen.
- Тип датчика
- Окружающая среда
- Диапазон рабочих температур
- Степень защиты корпуса
- Класс взрывозащиты.
- Ограничения
- Максимальная рабочая скорость
- Длина кабеля.
Датчики угла наклона (инклинометры)
Оптические энкодеры выпускаются в виде инкрементальных и абсолютных датчиков.
Позиционирование в различных видах промышленного оборудования обеспечивается с использованием простых с виду устройств — энкодеров (или, по-другому, датчиков угла поворота).
Энкодеры используются для преобразования линейного или вращательного движения в двоичный цифровой сигнал. Энкодер представляет собой устройство, вал которого соединяется с вращающимся валом исследуемого объекта, и обеспечивает электронный контроль угла поворота последнего. По принципу действия энкодеры подразделяются на оптические и магнитные.
На валу оптического энкодера установлен диск с окнами прерывания по периметру, напротив которых размещены светодиод и фототранзистор, обеспечивающие формирование выходного сигнала в виде последовательности прямоугольных импульсов с частотой, пропорциональной как количеству окон прерывания, так и скорости вращения диска/вала. Количество импульсов отображает угол поворота.
Оптические энкодеры выпускаются в виде инкрементальных и абсолютных датчиков.
Инкрементальные энкодеры имеют диск прерывания с множеством окон одинакового размера на основном радиусе и две считывающих оптопары, что позволяет фиксировать как угол поворота, так и направление вращения вала. На вспомогательном радиусе диска размещено единственное окно прерывания и соответствующая оптопара, определяющие исходное положение (начало отсчета).
Отрицательный момент — инкрементальные энкодеры выдают относительный отсчет угла поворота, информация о котором не сохраняется при остановке вращения. К их преимуществам следует отнести простоту конструкции (и, соответственно, невысокую стоимость) при высоком разрешении и высокой рабочей частоте.
Инкрементальные энкодеры повышенной стойкости ориентированы на индустриальное применение — в машиностроении, прокатных станах, судостроении, текстильной, обувной промышленности, в деревообработке. Для таких энкодеров определяющими являются параметры — разрешение по углу поворота, способность работать на высоких частотах, высокая степень защиты, чтобы противостоять условиям неблагоприятной среды.
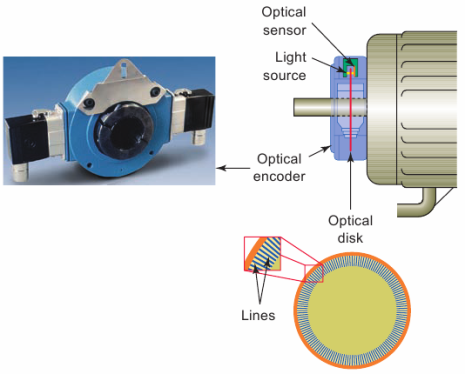
Диск с линиями или прорезями, которые прерывают луч света на оптический датчик. Электронная схема подсчитывает прерывания луча и генерирует цифровые выходные импульсы энкодера.
Кодирующий диск — устройство для преобразования в цифровую форму величин угловых перемещений вала. На кодирующий диск наносится геометрическое изображение цифрового кода. Знаки разрядов кода наносятся на концентрической дорожки, причем ближе к периферии располагаются младшие (менее значащие) разряды.
В зависимости от способа съема кода (контактного, фотоэлектрического, электромагнитного, индукционного, электростатического и т. п.) геометрическое изображение кода составляется из участков электропроводящих и электроизолированных, прозрачных и непрозрачных, магнитных и немагнитных и т. п.
Преимущественно распространение получили кодирующие диски с разновидностями двоичного кода, исключающими возникновение ошибок при переходе через границы отдельных дискретных участков, когда некоторые разряды могут считываться по одну сторону границы, а некоторые — по другую (из-за неточной установки съемных устройств или из-за неодновременном считывания кода в процессе вращения диска. К числу таких кодов относятся т. н. фау-код (код Баркера) и рефлексный код (код Грея).
В некоторых оптических поворотных энкодерах используется отражательный кодирующий диск. На этом диске чередуются секции, которые поглощают свет или отражают его, а источник света вместе с приемником располагаются с одной стороны диска. При наличии только одного источника и приемника света последовательность импульсов от датчика позволяет выяснить, на сколько шагов повернулся диск относительно своего предыдущего положения.
Одиночный датчик не может указывать направление вращения, но если добавить вторую пару «источник приемник», отстоящую по фазе на 90 о от первой, то микроконтроллер по разности фаз между последовательностями импульсов сможет определить направление вращения диска.
Следует помнить, что любая система, которая определяет относительное вращение диска, но не может измерить его абсолютное угловое положение, является инкрементным датчиком.
Абсолютный энкодер имеет диск прерывания с концентрическими окнами на разных радиусах, относительные размеры которых определяются двоичным кодом, и которые считываются одновременно, давая кодированный выходной сигнал для каждой угловой позиции (код Грея, бинарный код. ).
В данном случае имеется возможность получать данные о мгновенном положении вала без цифрового счетчика или возврата к исходному положению, так как на выходе имеется кодированное слово — «n bit», защищенное от электрических шумов.
Абсолютные энкодеры используются в приложениях, требующих обязательного сохранения поступающих данных в течение продолжительного времени, при этом они сложнее по конструкции и являются более дорогостоящими.
Абсолютные энкодеры с интерфейсом полевой шины имеют выходной интерфейс связи с полевой шиной по стандарту CANopen, ProfiBus, DeviceNet, Ethernet, InterBus и используют бинарный код при определении угла поворота. Вышеуказанные интерфейсы связи программируются по ряду параметров: например, направление вращения, разрешение по импульсам на один оборот, скорость передачи данных.

Энкодеры, установленные на валу электродвигателя , эффективно обеспечивают управление точным позиционированием. Такие энкодеры обычно изготавливаются в варианте «отверстие» и важными элементами их конструкции являются специальные муфты, позволяющие компенсировать люфты вала двигателя.
Позиционирование в вышеуказанных условиях наиболее эффективно обеспечивает магнитный энкодер , в котором преобразование углового перемещения вала в электронный сигнал реализуется бесконтактно на основе эффекта Холла, не связано с вращением оптического прерывателя внутри датчика, и допускает обработку сигналов на скоростях до 60000 об/мин.
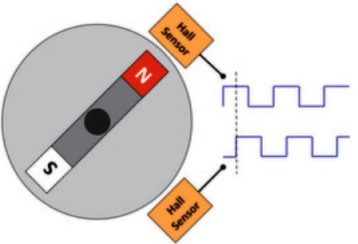
В магнитном энкодере высокоскоростное вращение внешнего вала, на котором закреплен цилиндрический постоянный магнит, воспринимается датчиком Холла, совмещенным на одном полупроводниковом кристалле с контроллером обработки сигналов.
При вращении полюсов постоянного магнита над микросхемой с датчиком Холла переменный вектор магнитной индукции наводит напряжение Холла, содержащее информацию о мгновенном значении угла поворота вала. Микроконтроллер обеспечивает быстрое преобразование напряжения Холла в параметр угла позиционирования.

Возможность такого преобразования без непосредственного механического соединения элементов магнита и датчика Холла является основным преимуществом магнитных энкодеров, обеспечивает им высокую надежность и долговечность, и позволяет эффективно работать в высокоскоростных приложениях, связанных с промышленной автоматизацией, полиграфией, металлообработкой, инструментально-измерительным оборудованием.
Сделайте небольшой донат на развитие сайта «Школа для электрика»!
Отличительными чертами магнитных датчиков являются, нечувствительность к пыли (непроводящей), грязи и парам жидкостей. При этом сильные магнитные поля могут вносить значительные помехи в работу магнитных датчиков.
В настоящее время большинство датчиков положения, применяемых в приводах — это энкодеры того или другого типа.
Энкодер – резольвер
Энкодер – потенциометр
Потенциометры, используемые как датчик положения, имеют мало конструктивных отличий от обычных потенциометров. Они являются относительно недорогими датчиками, которые могут обеспечить средний уровень точности и выпускаются в различных конструктивных исполнениях. По сравнению с энкодерами потенциометры имеют ограниченный срок службы из-за механического износа, чувствительны к вибрации и ударам и имеют ограниченный диапазон рабочих температур.
- коммутационное (бинарное) состояние (как простой датчик контактного типа);
- циклическая цифровая передача результатов измерения;
- прием программируемых параметров датчика и передача результатов его диагностики (например – перегрузка, перегрев и т.п.).
Принципы работы инкрементальных энкодеров
Инкриментальный энкодер неприхотливый в обслуживании прибор. Инкриментальный энкодер универсальный датчик применимый в большинстве сфер производства.
Применяется в основном два физических принципа реализации энкодера:
При разнообразии схемных решений, выходные сигналы инкрементальных энкодеров имеют один из двух форматов, в зависимости от напряжения питания датчика и выбора пользователя: TTL/RS422 или HTL/push-pull. Все устройства работают в пределах стандарта интерфейса IO-Link, выполняя, в зависимости от степени «интеллектуальности» три вида связи в системе:
- коммутационное (бинарное) состояние (как простой датчик контактного типа);
- циклическая цифровая передача результатов измерения;
- прием программируемых параметров датчика и передача результатов его диагностики (например – перегрузка, перегрев и т.п.).
Питание датчиков в основном осуществляется постоянным током 5В или 24В.
В данной статье будут затронуты вопросы применения энкодеров в современных системах АСУ ТП и некоторые аспекты культуры их производства, а также будут даны рекомендации по их эксплуатации.
Где используются датчики угловых перемещений
Энкодеры имеют довольно широкое применение.
Абсолютные и инкрементные энкодеры широко используются в металлургии, производстве бумаги, деревообработке, разнообразных линиях упаковки, станкостроении, энергетике и др.
Энкодеры устанавливаются на приводы прокатных станов, бумагоделательных и картонноделательных машин, а также пресспатов; на приводы координатных столов, продольно-резательных и поперечно-резательных (рубительных) машин, электрических задвижек, кранов, упаковочных агрегатов, лифтов, устройств выбора якоря на судах; на приводах суппортов и подачи токарных станков, в современных системах автоматического складирования, лесозаготовительных машинах и деревообрабатывающих станках, в системах ЧПУ и др.
Принцип действия энкодеров
Датчики угловых перемещений служат для измерения основных кинематических параметров работы электропривода: скорости и положения вала.
В подавляющем большинстве современных систем регулируемого привода, позиционирования и контроля углового положения используются инкрементные и абсолютные энкодеры. Определенный рынок, в связи с некоторыми техническими особенностями остается за резольверами (в частности, из-за их толерантности к высоким и низким температурам: от –50оС и до +150оС).
Принцип работы фотоимпульсных энкодеров – цифровой. Свет проходит от группы светодиодов к группе фотодиодов через прозрачный диск с нанесенными метками. Абсолютный энкодер имеет уникальную комбинацию меток для каждого углового положения, инкрементный – более прост: одинаковые метки равномерно распределены по всему радиусу диска.
Обычно энкодер имеет также т.н. «нулевую метку», одну – на полный оборот диска. Эта метка имеет калибровочную функцию и не всегда требуется для простых задач измерения скорости. При вращении диска, механически связанного с приводным валом, каждое прохождение метки через светодиодную пару генерирует импульс. Эти импульсы в дальнейшем обрабатываются с помощью электронных устройств (программируемых логических контроллеров, преобразователей постоянного и переменного тока для электродвигателей, счетчиков).
Абсолютные энкодеры иногда имеют встроенный редуктор, который позволяет датчику не только определять точное значение углового перемещения в пределах одного оборота вала, но и отсчитывать количество оборотов вала (обычно с дискретностью 12 бит, т.е. 4096 оборотов вала). Данные абсолютные энкодеры, которые называются «абсолютными многооборотными», часто используются в прецизионных червячных приводах подачи.
Основным же преимуществом абсолютного энкодера над инкрементным является функция сохранения текущего значения углового перемещения вне зависимости от того подано питание на датчик или нет.
Питание датчиков в основном осуществляется постоянным током 5В или 24В.
Функциональными особенностями инкрементных и абсолютных энкодеров обусловлено различие между ними в цене. Из-за более сложной технологии нанесения меток на диск, а также из-за необходимости передавать большее количество данных (с соответствующим усложнением электроники) стоимость среднего абсолютного энкодера в 1,4-2 раза превышает стоимость инкрементного аналога.
Нельзя также не упомянуть широкую сферу применения энкодеров в современном сервоприводе. Но сервопривод является совершенно особым устройством, заслуживающим отдельной статьи. Отметим лишь, что в основном в сервоприводах крупнейших производителей используются абсолютные однооборотные энкодеры с разрешением 17 бит (131072 положения на оборот).
Основные параметры, необходимые для выбора датчиков угловых перемещений
- Количество импульсов на оборот (обычно от 1 до 5000), количествово бит для абсолютных энкодеров (обычно 10, 12, 13, 25).
- Вал или отверстие под вал (укажите также диаметр вала или отверстия).
- Тип выходного сигнала (HTL, TTL, RS422, двоичный код и код Грея, SSI, Profibus DP, CAN. ).
- Напряжение питания.
- Длина кабеля/ тип разъема.
- Дополнительные требования по крепежу (необходимость муфты, монтажного фланца, крепежной штанги и др.).
Требования к установке энкодеров и рекомендации по их эксплуатации
Необходимость точной центровки при установке датчиков – главное требование для обеспечения долговременной их службы. Исполнение энкодера с валом предусматривает установку прецизионной муфты, которая должна демпфировать три параметра: угловое отклонение, осевое биение и несоосность валов при установке. Жесткое соединение валов обычно не допускается, т.к. может привести к существенному сокращению срока службы, из-за износа подшипников. Энкодер с валом должен крепиться к специально изготовленному фланцу.
Исполнение датчика с полым ротором исключает использование муфты и фланца. Энкодер монтируется прямо на нерабочий конец вала двигателя и закрепляется от проворота за валом с помощью крепежной штанги, которая дает энкодеру необходимую подвижность для компенсации углового отклонения.
Нужно отметить, что из соображений удобства установки сейчас все большее распространение получают энкодеры с полым валом.
Абсолютные датчики в противоположность инкрементным, сразу после включения выдают корректную информацию о положении. При этом абсолютные датчики бывают однооборотные, которые могут однозначно определять положение только в пределах одного оборота, и многооборотные, которые могут подсчитывать также и число оборотов.
В настоящее время большинство датчиков положения, применяемых в приводах — это энкодеры того или другого типа.
Энкодер – резольвер
Энкодер – потенциометр
Потенциометры, используемые как датчик положения, имеют мало конструктивных отличий от обычных потенциометров. Они являются относительно недорогими датчиками, которые могут обеспечить средний уровень точности и выпускаются в различных конструктивных исполнениях. По сравнению с энкодерами потенциометры имеют ограниченный срок службы из-за механического износа, чувствительны к вибрации и ударам и имеют ограниченный диапазон рабочих температур.
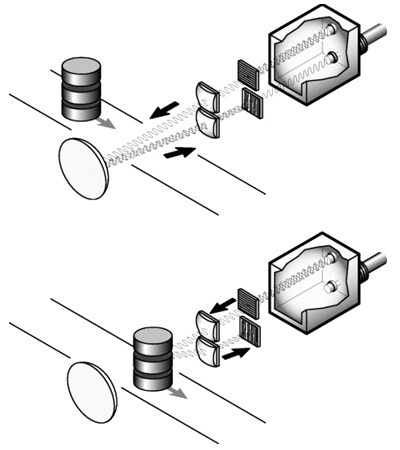
Энкодер может быть и оптическим (сигнал формируется излучателями фотоприемниками, см. на рисунке ниже), и магнитным (работает на эффекте Холла). В таком случае у него нет контактов и больше срок службы.
Часто в устройствах на микроконтроллерах нужно организовать управление пунктами меню или реализовать какие-то регулировки. Есть множество способов: использовать кнопки, переменные резисторы или энкодеры. Инкрементальный энкодер позволяет управлять чем-либо посредством бесконечного вращения ручки. В этой статье мы рассмотрим, как заставить работать инкрементальный энкодер и Arduino.
Особенности инкрементального энкодера
Инкрементальный энкодер, как и энкодеры любых других типов представляют собой устройство с вращающейся рукоятью. Отдаленно он напоминает потенциометр. Основным отличием от потенциометра является то, что рукоять энкодера вращается на 360 градусов. У него нет крайних положений.
Энкодеры бывают разных типов. Инкрементальный отличается тем, что с его помощью нельзя узнать положение рукояти, а только сам факт вращения в какую-то сторону – влево или вправо. По количеству импульсов сигнала вы уже можете рассчитать на какой угол он повернулся.
Таким образом вы можете передать микроконтроллеру команду, управлять меню, уровнем громкости, например, и так далее. В быту вы могли их видеть в автомагнитолах и другой технике. Его используют в качестве многофункционального органа регулировки уровней, эквалайзера и навигации по меню.

Принцип работы
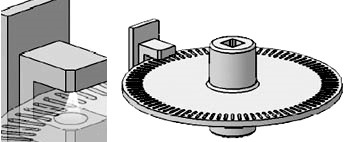
Внутри инкрементального энкодера есть диск с метками и ползунки, которые с ними соприкасаются. Его строение подобно потенциометру.

На рисунке сверху вы видите диск с метками, они нужны для прерывания электрического соединения со подвижным контактом, в результате вы получаете данные о направлении вращения. Конструкция изделия не столь важна, давайте разберемся в принципе работы.
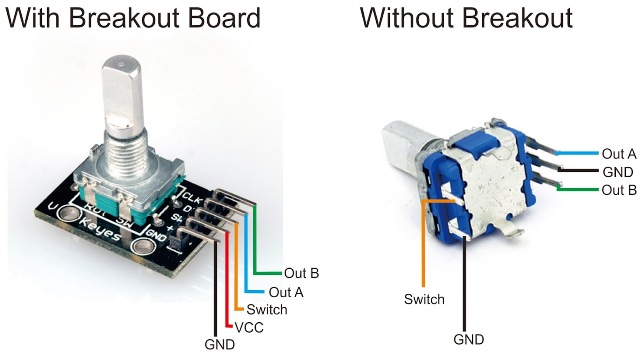
У энкодера есть три информационных вывода один общий, остальные два обычно называют «A» и «B», на рисунке выше вы видите цоколевку энкодера с кнопкой – вы можете получать сигнал при нажатии на его вал.
Какой сигнал мы получим? В зависимости от направления вращения логическая единица сначала появится на выводе A или B, таким образом мы получаем сдвинутый по фазе сигнал, а этот сдвиг позволяет определить в какую сторону. Сигнал получается в виде прямоугольной формы, а управление микроконтроллером происходит после обработки данных направления вращения и количества импульсов.
На рисунке изображено условное обозначение диска с контактами, по середине график выходных сигналов, а справа таблица состояний. Этот прибор часто рисуют как две клавиши, что логично, ведь фактически мы получаем сигнал «вперед» или «назад», «вверх» или «вниз», и количество воздействий.
Вот пример цоколевки реального энкодера:
Интересно:
Неисправный энкодер можно заменить двумя кнопками без фиксации, и наоборот: самоделку управление в которой осуществляется двумя такими кнопками можно доработать, установив энкодер.
На видео ниже вы видите чередование сигнала на выводах – при плавных вращениях светодиоды загораются в последовательности отраженной на предыдущем графике.
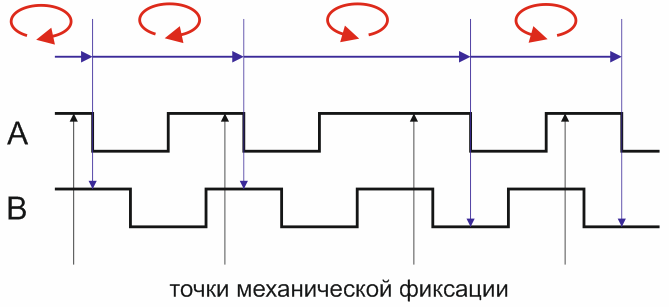
Не менее наглядно это проиллюстрировано на следующей анимации (нажмите на рисунок):
Энкодер может быть и оптическим (сигнал формируется излучателями фотоприемниками, см. на рисунке ниже), и магнитным (работает на эффекте Холла). В таком случае у него нет контактов и больше срок службы.
Как уже было сказано, направление вращения можно определить по тому, какой из выходных сигналов раньше изменился, а вот так это выглядит на практике!
Точность управления зависит от разрешения энкодера – количества импульсов на оборот. Количество импульсов может быть от единиц до тысяч штук. Так как энкодер может выступать в качестве датчика положения, то чем больше импульсов – тем точнее будет происходить определение. Этот параметр обозначается как PPR – pulse per revolution.
Но есть небольшой нюанс, а именно похожее обозначение LPR – это количество меток на диске.
А количество обрабатываемых импульсов. Каждая метка на диске даёт 1 прямоугольный импульс на каждом из двух выходов. У импульса есть два фронта – задний и передний. Так как выхода два то с каждого из них мы в сумме получаем 4 импульса значения которых вы можете обработать.
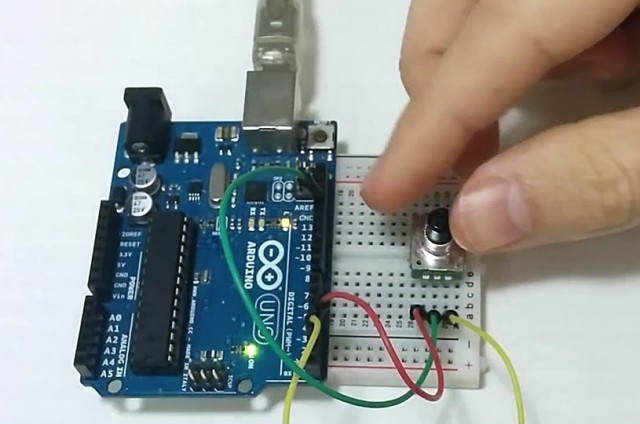
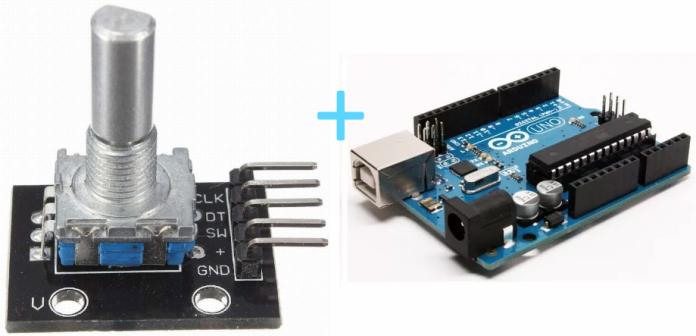
Подключаем к Arduino
Мы разобрались с тем что нужно знать об инкрементальном энкодере, теперь давайте узнаем, как подключить его к Ардуино. Рассмотрим схему подключения:
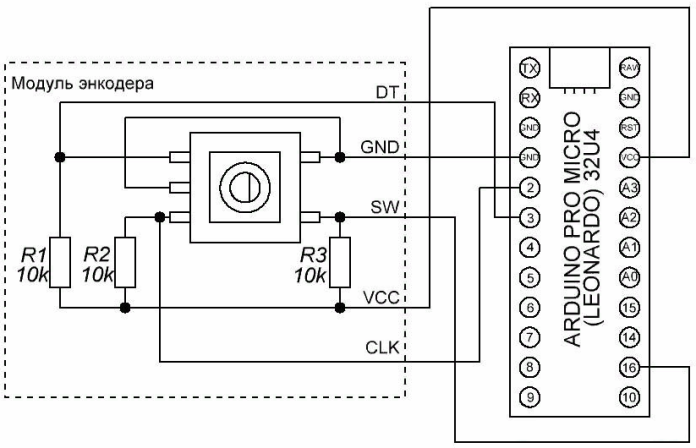
Модуль энкодера – это плата на которой расположен инкрементальный энкодер и подтягивающие резисторы. Пины можно использовать любые.
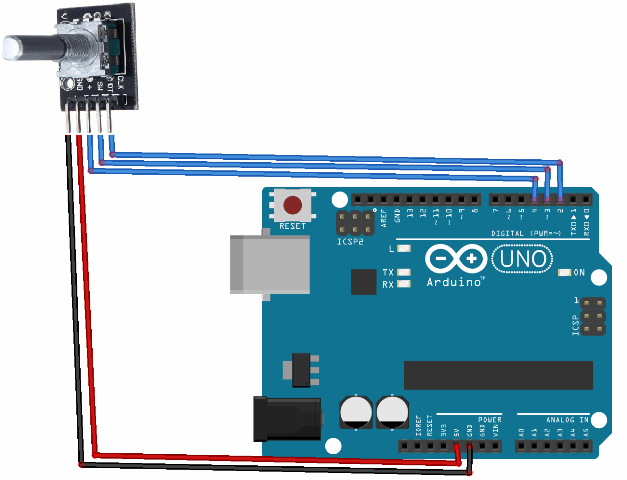
Если у вас не модуль, а отдельный энкодер, вам всего лишь нужно добавить эти резисторы, схема не будет ничем отличаться принципиально. Для проверки направления вращения и работоспособности его в связке с Ардуино мы можем прочитать информацию с последовательного порта.
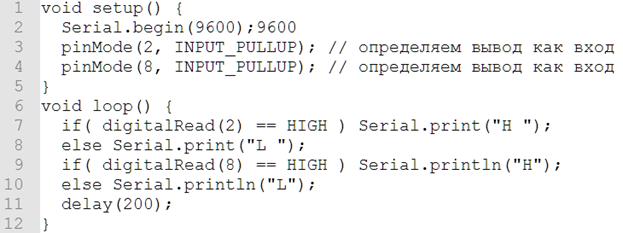
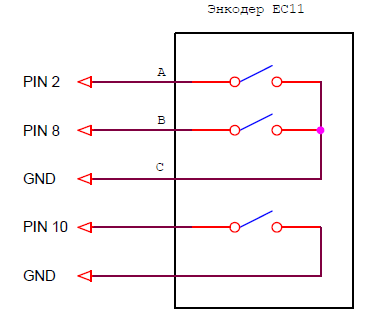
Разберем код подробнее, по порядку. В void setup() мы объявили что будем использовать связь через последовательный порт, а затем установили пины 2 и 8 в режим входа. Номера пинов выбираете сами исходя из вашей схемы подключения. Константа INPUT_PULLUP выставляет режим входа, у ардуино есть два варианта:
INPUT – вход без подтягивающих резисторов;
INPUT_PULLUP – подключение ко входу подтягивающих резисторов. Внутри микроконтроллера уже есть резисторы, через которые вход соединяется с плюсом питания (pullup).
Если вы используете резисторы для подтяжки к плюсу питания как изображено на схемах, приведенных выше или используете модуль энкодера – пользуйтесь командой INPUT, а если по какой-то причине не можете или не хотите использовать внешние резисторы – INPUT_PULLUP.
Логика основной программы следующая: если на входе «2» у нас единица – выдаёт в монитор порта H, если нет – L. Таким образом при вращении в одну сторону на мониторе последовательного порта получится что-то вроде этого: LL HL HH LH LL. А в обратную: LL LH HH HL LL.
Если вы внимательно прочли строки, то наверняка заметили, что в одном случае первый символ приобретал значение, а в другом случае сначала изменялся второй символ.
Заключение
Инкрементальные энкодеры нашли широкое практическое применение в усилителях для акустических систем – их использовали в качестве органа управления регулятора громкости, в автомагнитолах – для регулировки параметров звука и навигации по меню, в компьютерных мышках с его помощью вы ежедневно прокручиваете страницы (на его вале установлено колесико). А также в измерительных инструментах, ЧПУ станках, роботах, в сельсинах не только в качестве органов управления, но и измерения величин и определения положения.
Надежный и неприхотливый угловой датчик для широкого круга задач. Применяется в качестве датчика положения в станочном, крановом, конвейерном оборудовании, системах автоматизации, радиолокационных станциях и во многих других областях.
Абсолютный угловой энкодер
- Описание
- Характеристики
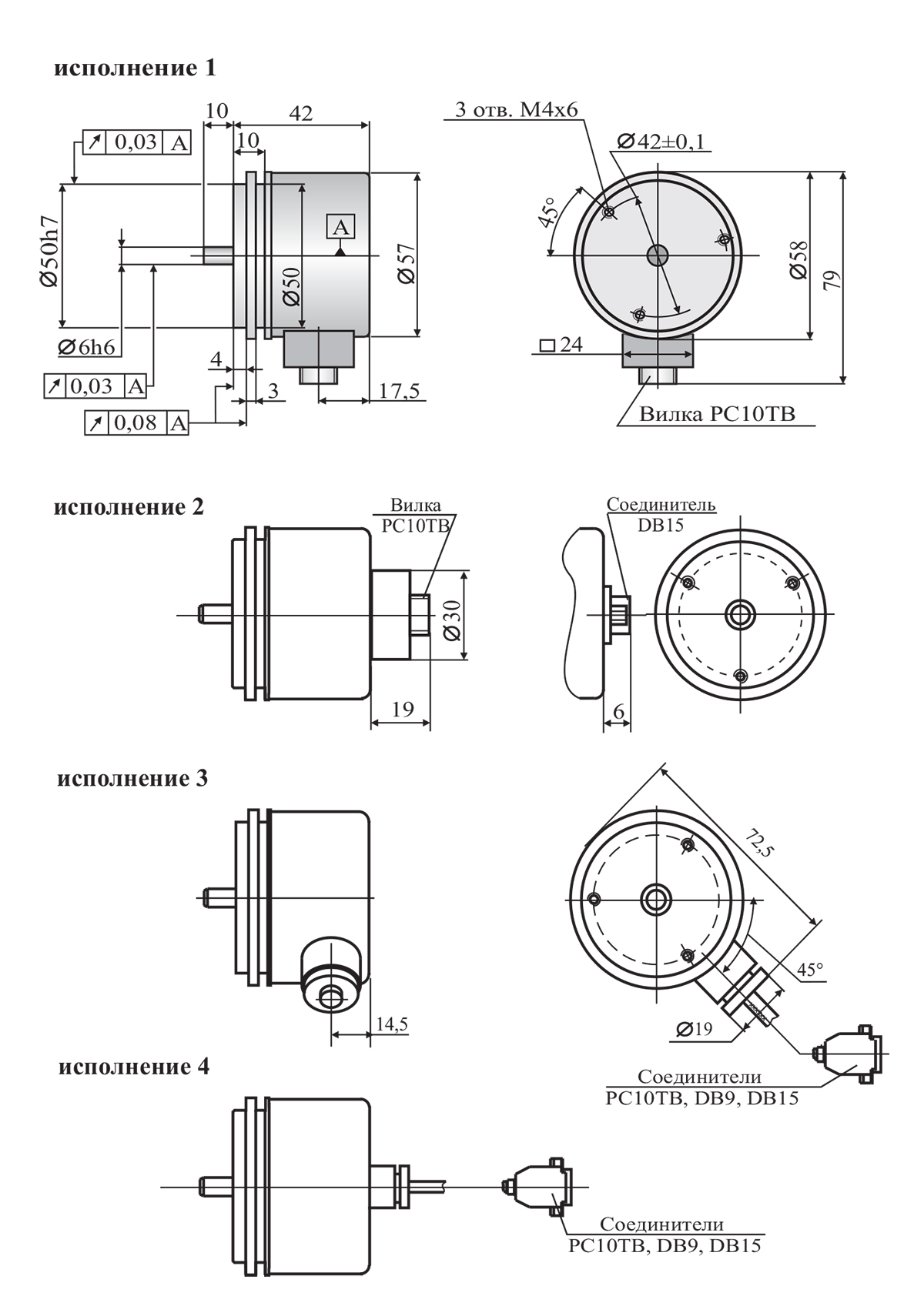
- Чертежи
- Чертеж
- Выходные сигналы
- Рекомендуемая схема подключения
- Распайка соединителя
- Форма заказа
- Файлы
Абсолютный однооборотный оптоэлектронный преобразователь угловых перемещений (абсолютный энкодер) общепромышленного назначения. В сравнении с ЛИР-ДА158А.02 имеет более высокое разрешение и скорость вращения вала без сбоя выходного кода вместе с меньшей допустимой погрешностью. Принцип работы прибора основан на считывании так называемой «нониусной шкалы», состоящей из нескольких растровых дорожек, различающихся количеством штрихов.
Диаметр корпуса 58 мм, диаметр цельного вала 6 мм, разрешающая способность — до 2097152 позиций на обороте (до 21 бита), напряжение питания +5 В или от +10 до 30 В, последовательные интерфейсы передачи данных RS422 SSI и BiSS C. Предел основной допускаемой погрешности ±15″.
Интерфейс BiSS C является предпочтительным и рекомендуется для применения в новых проектах. В отличие от ЛИР-ДА158А.02, вариант с SSI выходом не передает Alarm бит, в кадре присутствует только код положения. Также возможна выдача дополнительно инкрементного сигнала СН (1Vpp) 1024 периода/оборот для позиционирования при больших скоростях вращения вала.
Фланец типа «Synchro», унифицированный с широко распространенными энкодерами Heidenhain ROD 426 и ROD 456.
Надежный и неприхотливый угловой датчик для широкого круга задач. Применяется в качестве датчика положения в станочном, крановом, конвейерном оборудовании, системах автоматизации, радиолокационных станциях и во многих других областях.
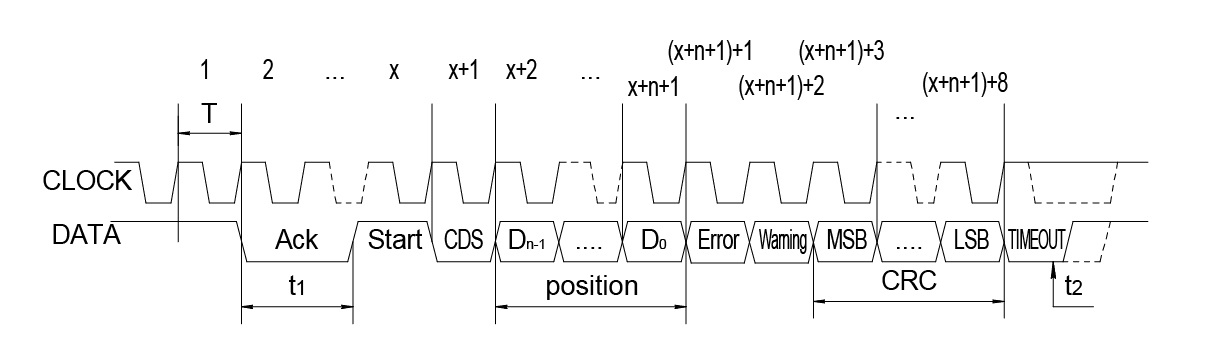
BiSS C
Информация CLOCK и DATA на рисунке не показаны
CLOCK — входной управляющий сигнал
DATA — выходной сигнал
T — не менее 100 нс
Время расчета позиции t1:
- до 19 бит: ≤ 9.5 мкс
- 20 бит: ≤ 9.9 мкс
- 21 бит: ≤ 10.2 мкс
- 22 бита: ≤ 10.6 мкс
- 23 бита: ≤ 11 мкс
Таймаут t2 ≤ 16 мкс
Подтверждение Ack — всегда установлен в 0
Бит Start — всегда установлен в 1
Бит CDS — всегда установлен в 0
D — код положения, количество бит кода n
Бит Error — указывает на наличие ошибки если установлен в 0
Бит Warning — указывает на наличие предупреждения если установлен в 0
Шесть бит контрольной суммы CRC, полином 0х43, начальное значение 0
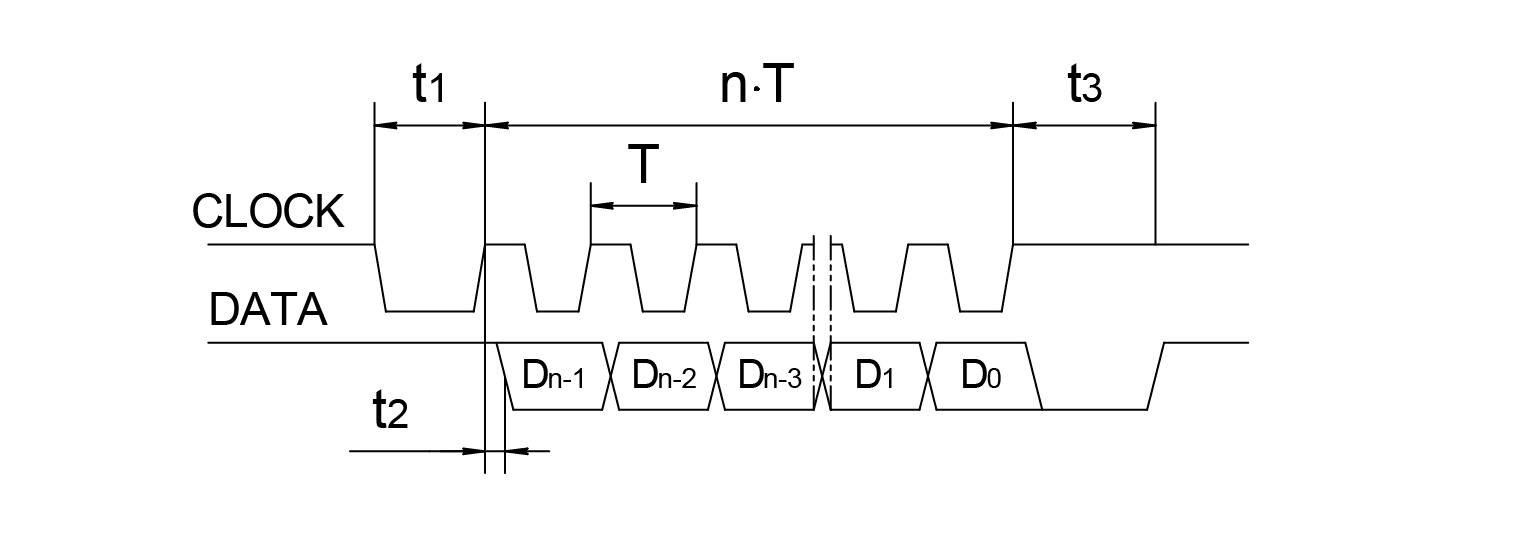
Последовательный SSI
Информация CLOCK и DATA на рисунке не показаны
CLOCK — входной управляющий сигнал
DATA — выходной сигнал с числом разрядов n
T — от 0.25 мкс до 16 мкс
t1 ≤ 9.5 мкс
t2 ≤ 0.4 мкс
t3 ≤ 16 мкс
В исходном состоянии шины CLOCK и DATA установлены в логическую 1 . После первого спада CLOCK шина DATA устанавливается в 0 и в преобразователе происходит фиксация текущей позиции.
http://kipia.ru/catalog/oborudovanie/sredstva-avtomatizatsii/datchiki/magnitnyj/
http://f-enco.ru/blog/tekhnologii/absolyutnye-uglovye-enkodery/
http://www.maxplant.ru/article/encoder.php
http://electricalschool.info/spravochnik/apparaty/1765-jenkodery-datchiki-ugla-povorota.html
http://avi-solutions.com/library/statyi/enkodery-opisanie-tekhnologii-i-vidy/
http://rusautomation.ru/inkrementalnyy_enkoder
http://www.consys.ru/press-czentr/osobennosti-primeneniya-datchikov-uglovyix-peremeshhenij-na-proizvodstve.html
http://avi-solutions.com/library/statyi/enkodery-opisanie-tekhnologii-i-vidy/
http://electrik.info/microcontroller/1489-kak-podklyuchit-inkrementalnyy-enkoder-k-arduino.html
http://skbis.ru/catalog/rotary/absolute-rotary-encoders/lir-da158a03