Механизмы имеют ряд параметров, характеризующих их работу:
Сервопривод – механизм, имеющий в своем устройстве специальный датчик, по которому отслеживаются определенные значения, блок управления, двигатель. Задачей устройства является контроль и поддержание параметров во время работы, в зависимости от сигнала, передаваемого в отдельный момент времени.

По способу управления могут быть аналоговые или цифровые сервоприводы, первый из них подает сигналы с разной частотой, которая задается специальной микросхемой, контролирующей работу устройства. Цифровые сервоприводы, в свою очередь, отличаются наличием процессора, который принимает команды и реализует их в качестве различных режимов работы на приводе.
Что такое сервопривод?
Под сервоприводом следует понимать такое устройство, которое обеспечивает возможность управления рабочим органом посредством обратной связи. Само название произошло от латинского servus, что в переводе означает помощник. Изначально сервопривод использовался в качестве вспомогательного оборудования для различных станков, машин и механизмов. Однако с развитием технологий и постоянно растущей необходимостью повышать точность электронных устройств им начали отводить куда более значимую роль.
Устройство и принцип работы
Устройство и принцип работы каждого сервопривода может кардинально отличаться от других моделей. Однако в качестве примера мы рассмотрим наиболее актуальные варианты.
Конструктивно он может состоять из:
Принцип действия заключается в подаче управляющего импульса на асинхронный или синхронный двигатель, который начинает вращаться, пока рабочий орган не окажется в нужной позиции. Как только будет достигнуто установленное положение, на датчике обратной связи появится нужный сигнал, который, перейдя на блок управления, прекратит питание электромеханического устройства. Движение сервопривода прекратится до появления новых электрических сигналов.
Далее начнется новый цикл работы устройства, число команд и последовательность их выполнения определяется заложенной программой.
Сравнение с шаговым двигателем
Вполне вероятно вы могли слышать, что та же функция часто выполняется шаговыми двигателями, однако между этими двумя устройствами имеется существенное отличие. Шаговый привод действительно осуществляет точное позиционирование объекта за счет четкого числа подаваемых на электрическую машину импульсов, они достаточно тихоходны и не создают лишнего шума. В остальном сервоприводы обладают рядом весомых преимуществ по сравнению с шаговыми электродвигателями:
Но кроме перечисленных преимуществ есть ряд позиций, по которым сервопривод уступает шаговому двигателю:
Назначение
Сервопривод используется в самых различных направлениях науки и техники, где электрический привод, помимо функции вращения каких-либо элементов, должен выполнить и точное позиционирование. На практике они повсеместно используются в ЧПУ станках, автоматических задвижках, электронных клапанах, заводских станках с программным управлением, робототехнике.
В бытовых системах сервомоторы устанавливаются в системах отопления для регулировки подачи теплоносителя, топлива, управления нагревательным элементом, контроля переключения между центральными и автономными системами энергетических ресурсов и т.д. В автомобилях их используют для отпирания, запирания багажника, электронных блокировок.
Для управления такими двигателями принят стандарт управляющего сигнала. Он представляет собой постоянно повторяющиеся импульсы или, как мы говорим, череду импульсов (Рис. 3). Частота этих импульсов все время остается постоянной и составляет 50 Гц. Получается, что временной период импульсов (время между передними фронтами соседних импульсов) составляет 1с/50 = 0,02 секунды, т. е. 20 миллисекунд.
Сервопривод (лат.servus – слуга, помощник; следящий привод) — привод с управлением через отрицательную обратную связь , позволяющую точно управлять параметрами движения.
Рисунок 1

Рисунок 2
Для управления такими двигателями принят стандарт управляющего сигнала. Он представляет собой постоянно повторяющиеся импульсы или, как мы говорим, череду импульсов (Рис. 3). Частота этих импульсов все время остается постоянной и составляет 50 Гц. Получается, что временной период импульсов (время между передними фронтами соседних импульсов) составляет 1с/50 = 0,02 секунды, т. е. 20 миллисекунд.
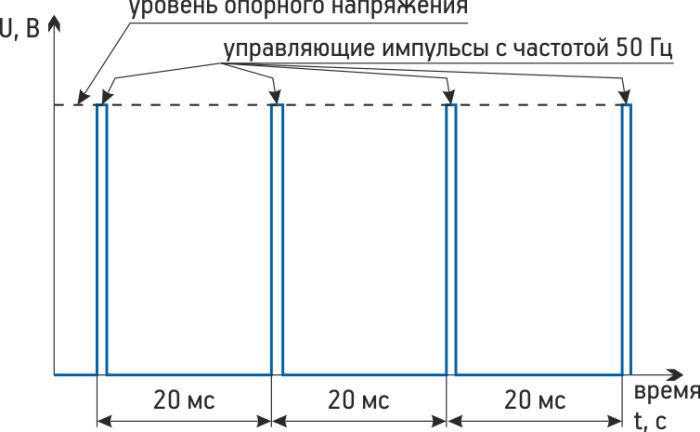
Рисунок 3
Что интересно, угловое положение выходного вала сервопривода задается продолжительностью подаваемого импульса. Для пояснения на рисунке 4 показано приблизительное соотношение ширины импульса во временных координатах и угла поворота вала сервопривода. Управление поворотом вала сервопривода выполняется с помощью импульсов продолжительностью от 1 до 2 мс (миллисекунд).
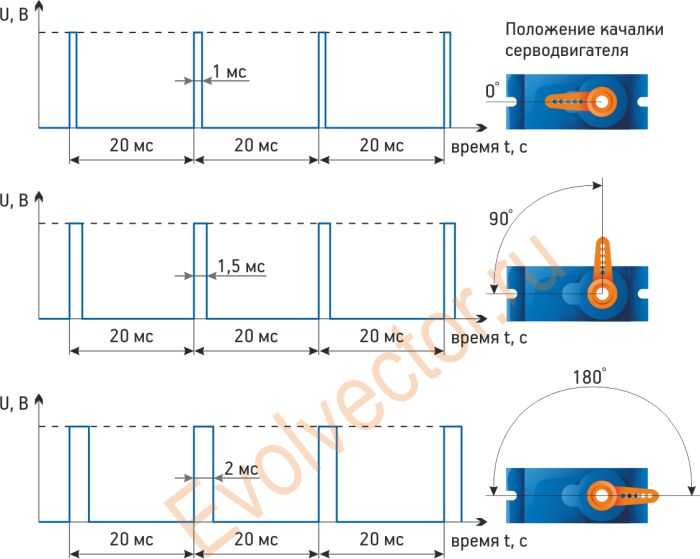
Рисунок 4
Как видно из графика, для управления сервоприводом используется не что иное как сигнал с широтно импульсной модуляцией — ШИМ. Что такое ШИМ можно узнать из соответствующей статьи на нашем сайте.
А как ширина импульса превращается в угол вала на выходе?
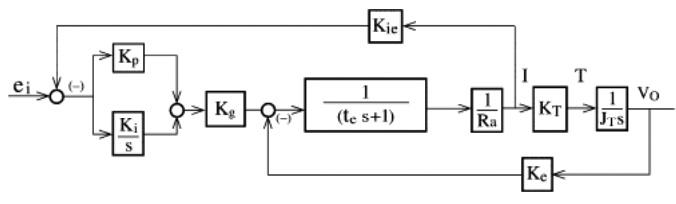
Как указано на рисунке 2, в корпусе сервопривода присутствует еще и электронный модуль управления мотором. Подаваемый на сервопривод сигнал попадает на эту плату. А вот то, что происходит с этим сигналом дальше, показано на блок-схеме рисунок 5, которую мы проанализируем поэтапно. Каждый этап изображен прямоугольником или кружочком и пронумерован. Внутри этих прямоугольников изображены устройства, на которых происходит преобразование или обработка сигнала.
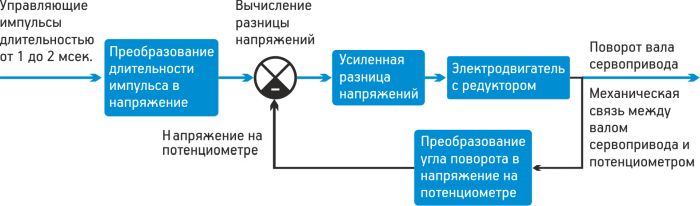
Рисунок 5
Итак, входной управляющие сигнал Sупр с ШИМ модуляцией приходит на специальную микросхему с логическими элементами, с помощью которой преобразуется в напряжение Uупр (этап №1). После этого сигнал Uупр (управляющее напряжение) поступает на элемент сравнения напряжений. Данный элемент называется сумматором, но на самом деле он из входного сигнала Uупр вычитает напряжение Uобр (напряжение обратной связи), приходящее через обратную связь с переменного резистора (этап №2).
Примеры управления серводвигателем
Как было сказано выше, для управления серводвигателем приминяется ШИМ с определенными параметрами. Сгенерировать такую ШИМ можно различными способами. Покажем некоторые из них.
1. Управление серводвигателем при помощи 555 таймера. Микросхема таймера 555 может работать в режиме генератора импульсов (подробнее об этой микросхеме читайте соответствующую статью). Следовательно можно подобрать такие параметры работы этой микросхемы, что бы она выдавала нужные нам импульсы. Путем изменения скважности этих импульсов, т. е. изменения продолжительности импульсов от 0,001 до 0,002 секунды, мы и будем задавать угол поворота вала сервопривода.
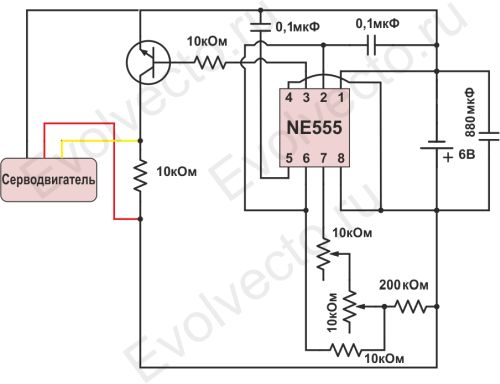
Рисунок 6
Более подробно изучить данную схему, а так же собрать ее, вы сможете купив Основной набор 1-ого уровня Эвольвектор.
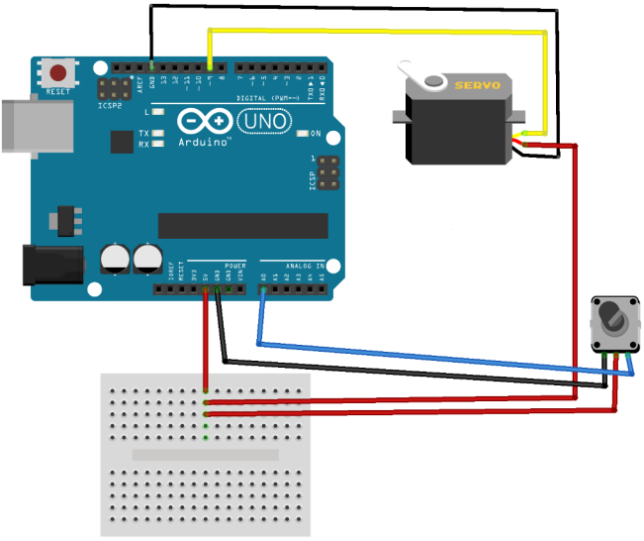
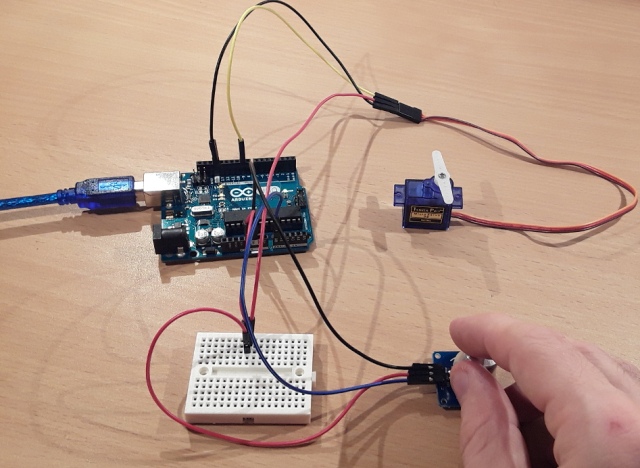
Схема подключения, а так же Скетч (программа) для управления серводвигателем контроллером Arduino показаны на рисунке 7.
Для реализации данной схемы на макетной плате Вам потребуются:
1. Контроллер
2. Макетная плата
3. Сервопривод
4. Провода
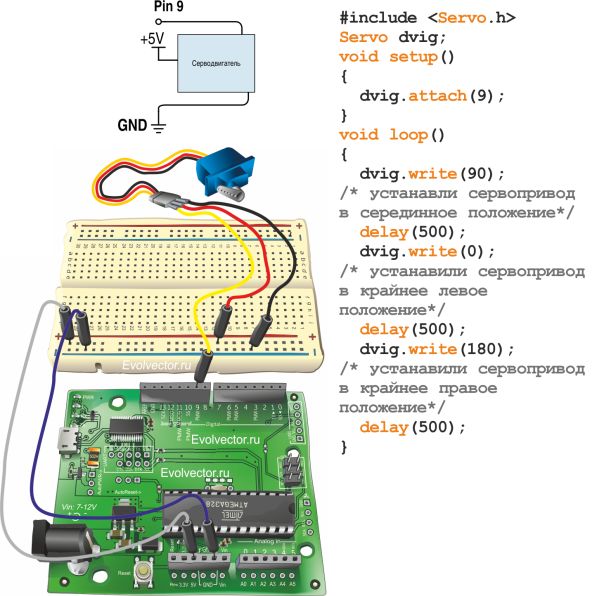
Рисунок 7
#include Servo .h> — эта команда означает подключение библиотеки для управления сервоприводом. Эта библиотека присутствует на диске Эвольвектор, который поставляется совместно с нашими наборами 2-ого уровня. Так же её можно найти в интернете и положить в папку «libraries» вашей Arduino IDE.
Подключенная нами библиотека имеет большое количество команд, мы рассмотрим только те, который используются в программе.
Что означают остальные строки в программе вы можете найти на страницах нашего сайта или узнать из учебных пособий которые входят в состав наборов Эвольвектор 2 ого уровня.
Системы ЧПУ, при работе таких механизмов, как серводвигатели, остаются идеально сбалансированными, что обеспечивает высокую производительность без потерь в качестве. Однако не стоит полностью полагаться на датчики ЧПУ и необходимо самостоятельно проверять работу серводвигателей. При всей надёжности подобного оборудования контроль оператора ЧПУ необходим, при этом желательно, чтобы работник (оператор) имел специальное образование.
Принцип работы и управление серводвигателями
Конечно же, довольно важно рассмотреть общие аспекты работы серводвигателей, ведь вне зависимости от приводящих механизмов, важна их техническая составляющая.
Первым аспектом, который важно отметить является условие работы серводвигателя строго в системе G-кодов. Другими словами движущие элементы двигателя ориентируются по 3 основным осям координат (соответственно это X,Y,Z). При этом за разность в значениях координат отвечают импульсы энергии, которые подаются на двигатель. При каком-либо смещении, относительно оси координат, рабочие параметры серводвигателя также изменяются.
Системы ЧПУ, при работе таких механизмов, как серводвигатели, остаются идеально сбалансированными, что обеспечивает высокую производительность без потерь в качестве. Однако не стоит полностью полагаться на датчики ЧПУ и необходимо самостоятельно проверять работу серводвигателей. При всей надёжности подобного оборудования контроль оператора ЧПУ необходим, при этом желательно, чтобы работник (оператор) имел специальное образование.
Стоимость серводвигателей определяется мощностью устройства, так как мощностной уровень сказывается на производительности функционирования всего оборудования, работающего при помощи данных механизмов. Также, немалую роль играет компактность и легкость в установочном обслуживании серводвигателей.
Рулевой сервопривод – устройство с электродвигателем, которое позволяет добиться точного управления форматом движения радиоуправляемой модели путем отрицательной обратной связи. Любой сервопривод в своем устройстве имеет датчик и блок управления, который поддерживает определенные значения на датчике в соответствии с внешним параметром.
Рулевой сервопривод – устройство с электродвигателем, которое позволяет добиться точного управления форматом движения радиоуправляемой модели путем отрицательной обратной связи. Любой сервопривод в своем устройстве имеет датчик и блок управления, который поддерживает определенные значения на датчике в соответствии с внешним параметром.
Опишем более простым языком, как работает сервопривод:
- Сервопривод получает импульсный сигнал – управляющее значение, которое определяет угол поворота качалки сервы,
- Блок управления начинает сравнение поступившего параметра со значением на своем датчике,
- В зависимости от результата сравнения БУ возвращает сигнал, который предопределяет, какое действие необходимо выполнить: повернуть, ускориться или замедлиться, чтобы сравниваемые показатели стали одинаковыми.
Устройство сервопривода
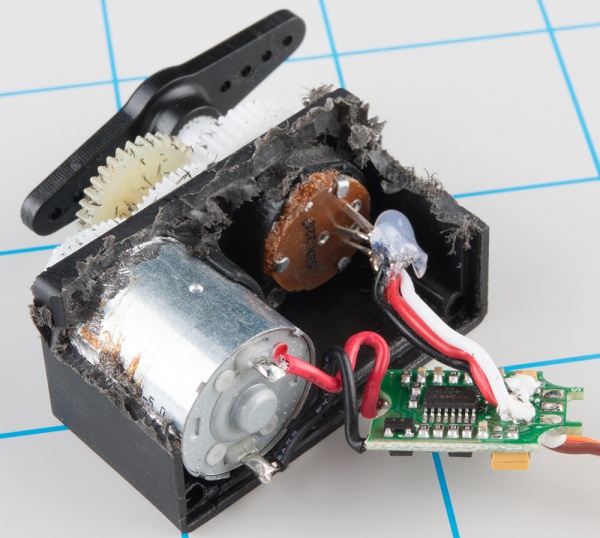
Большинство современных рулевых машинок построены по одному принципу и состоят из таких составных частей: выходной вал, шестерни редуктора, двигатель постоянного тока, потенциометр, печатная плата и управляющая электроника.
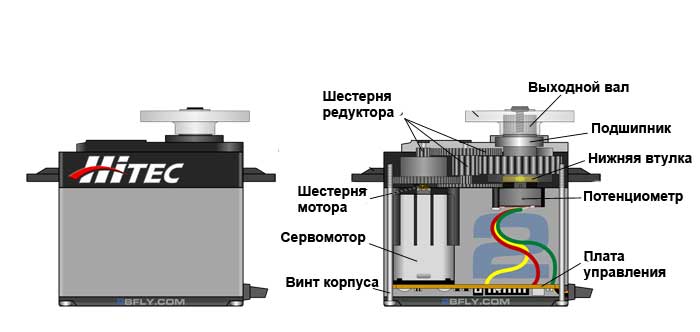
Редуктор вместе с мотором образуют привод. Чтобы трансформировать поступающее напряжение в механический поворот, нужен электродвигатель. Редуктор же – конструкция из шестеренок – преобразует крутящий момент и служит для понижения скорости вращения двигателя, так как часто она настолько большая, что совсем не годится для практического применения.
Вместе с включением и выключением электродвигателя вращается и выходной вал, к которому закрепляется качалка – ее, в свою очередь, крепят к рулю модели. Именно качалка будет задавать движение нашей модели, а для этого в устройстве сервопривода предусмотрен потенциометр – датчик, способный превратить угол поворота обратно в электро-сигнал.
Однако, одним из главных элементов является плата управления, которая представляет собой электронную схему. Именно она получает электрический импульс, анализирует полученный сигнал с данными потенциометра и включает/выключает электродвигатель. Вот как устроен сервопривод и работа его элементов.
Кстати, в качестве мотора в устройстве сервопривода могут использоваться коллекторные, коллекторные Coreless и бесколлекторные двигатели.
Управление сервоприводом. Принцип работы.
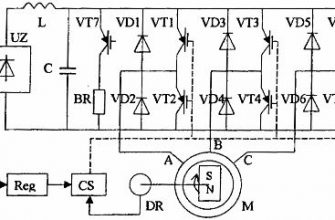
Сервопривод получает импульсные сигналы, которые проходят по специальному проводу от приемника. Частота таких сигналов составляет 20мс, а их продолжительность может варьироваться в пределах 0,8-2,2мс. Чтобы у вас появилось четкое представление, как все-таки сигнал трансформируется в перемещение качалки, нужно проанализировать стандартную схему сервы.
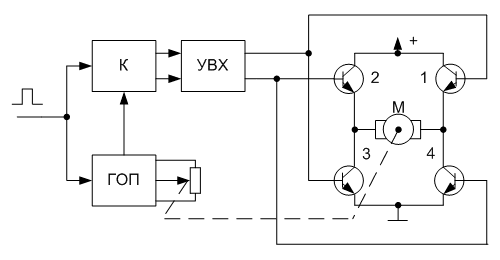
где, ГОП – генератор опонного импульса (к нему подсоединен потенциометр), К – компататор, УВХ – устройство выборки-хранения, М – электрический мотор, который охватывается диагональю силового моста.
Принцип работы сервопривода в разных условиях
Позиция качалки сервы соответствует состоянию стика пульта управления. Продолжительность опорного и управляющего импульсов одинакова. На всех выходах компататоров выставлено значение «0». Двигатель обесточен и качалка удерживает первоначальную позицию.
Пилот отводит стик пульта в противоположную сторону, уменьшая при этом длину управляющего импульса. Управление сервоприводом на этом этапе схоже с процессом, описанном выше. На нижнем выходе компататора образуется разностный импульс, который запоминается УВХ и подает напряжение на двигатель. Мотор начинает вращаться, но уже в другую сторону, и продолжает работу до того момента, как длины импульсов снова не примут одинаковые значения.
Пилот не взаимодействует с пультом управления. Руль модели начинает поворачивать качалку сервопривода, так как учитывает нагрузку во время хода. Теперь меняется продолжительность опорного импульса, за счет чего разностный импульс посредством компататора и УВХ воздействует на двигатель и осуществляется подача момента на редуктор, что препятствует повороту качалки. Т.е. качалка удерживается в одном положении.
Мы разобрали работу сервопривода в упрощенном варианте. На самом деле существует множество нюансов по настройке и использования девайса, зная которые можно избежать поломок и неприятных ситуаций.
Теперь, зная, как устроен сервопривод, принцип его работы, можно отправляться и выбирать девайс для своей модели. Для этого вам нужно перейти в правильный раздел сайта «Planeta Hobby». Если же у вы не знаете, как правильно подобрать серву для своего самолета или авто, обращайтесь за советом нашего консультанта или читайте эту полезную статью.
Комбинация импульсов для управления положением может передавать информацию не только по положению, но также по скорости и направлению вращения двигателя. Для этого могут использоваться три типа сигналов: 1) квадратурные импульсы (со сдвигом фаз на 90 градусов), 2) импульсы вращения по или против часовой стрелки, действующие поочередно и 3) импульсы скорости и потенциал направления, подающиеся на два входа.
Процесс рекуперации
Рекуперация происходит при изменении направления (знака) момента нагрузки по отношению к вращающему моменту серводвигателя. Если энергия рекуперации невелика, она накапливается на конденсаторах звена постоянного тока, повышая напряжение на них.
Если разница абсолютных значений моментов нагрузки и серводвигателя составляет значительную величину, напряжение на конденсаторах шины постоянного тока может превысить пороговый уровень. В этом случае энергия рекуперации сбрасывается в тормозной резистор.
- гибридный шаговый двигатель с габаритами NEMA 23 и 34;
- преобразователь частоты на основе высокопроизводительного DSP процессора;
- блок управления (сервоконтроллер и программируемый логический контроллер в одном корпусе);
- датчик позиции вала мотора.


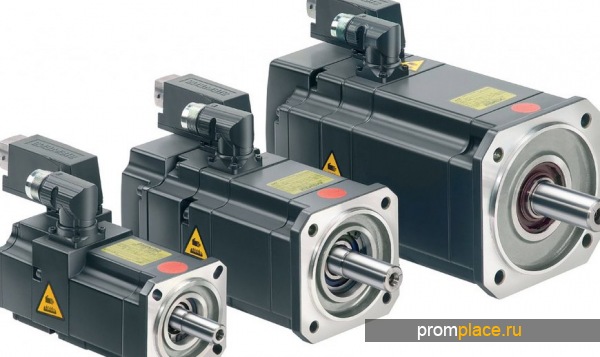
Базовым движущим элементом сервопривода — является электродвигатель (так называемый «сервомотор» или «серводвигатель«). Электродвигатель — это электромеханическое устройство (машина) для преобразования электрической энергии в механическую.
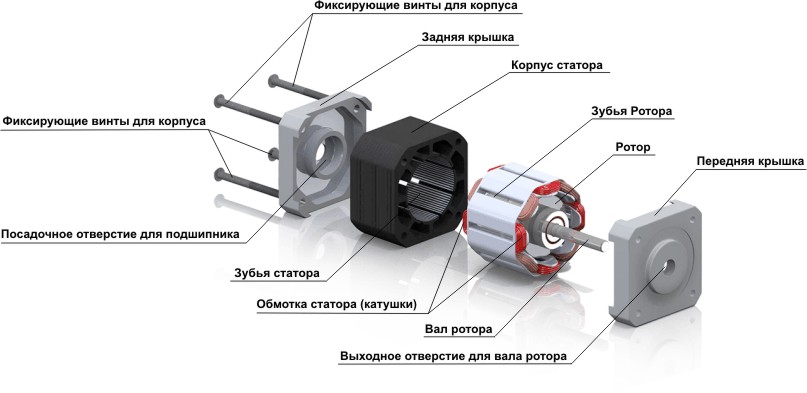
Электродвигатель (или электромотор) состоит из двух основных частей: из статора, часто неподвижной части и из ротора (или якоря) — подвижной вращающейся части. Электродвигатели бывают разных типов и конструкций. Каждый тип электродвигателя имеет свои особенности и, соответственно, эксплуатационные характеристики, которые определяют применение электродвигателя на практике.
Применение сервоприводов
— Шаговые электродвигатели — применяются в основном в бюджетных решениях сервоприводов.
Шаговый двигатель представляет собой бесколлекторное устройство электромеханического типа, имеющее несколько обмоток. На шаговый двигатель подаются короткие электроимпульсы, при помощи драйвера, которые последовательно активируют каждую из обмоток и приводят в движение ротор, вызывая угловые дискретные (или так называемые шаговые) перемещения. От сюда и берется название «шаговый» электродвигатель.
— Синхронные электродвигатели — универсальные сервоприводы для для высокоточных применений и пр.
— Асинхронные электродвигатели — универсальные сервоприводы для насосной и компрессорной техники, подъемных механизмов и пр.
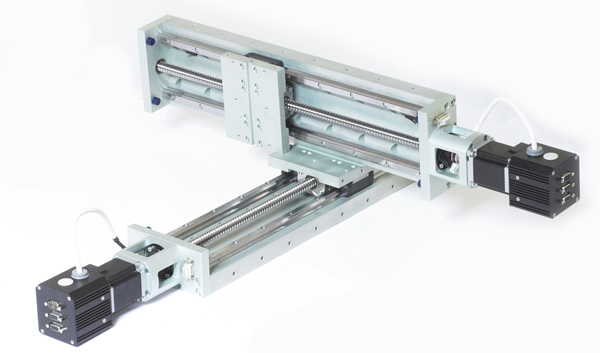
— Линейные электродвигатели — относительно дорогие, сверхточные сервоприводы для скоростного перемещения полезной нагрузки, для высокоточных порталов, прецизионные станки, научное оборудование и пр.
Типы сервоприводов
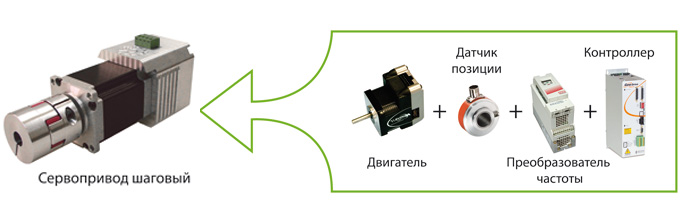
Конструктивно сервопривод СПШ можно разделить на следующие основные блоки:
- гибридный шаговый двигатель с габаритами NEMA 23 и 34;
- преобразователь частоты на основе высокопроизводительного DSP процессора;
- блок управления (сервоконтроллер и программируемый логический контроллер в одном корпусе);
- датчик позиции вала мотора.
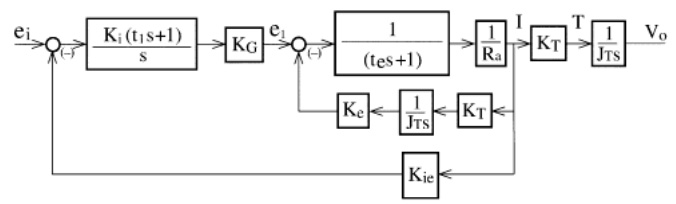
Сервопривод — конструктивные особенности
Если блок-схема на рисунке выше не реализуема, следующая болк-диаграмма разделяет серво-петли на внутреннюю и внешнюю:

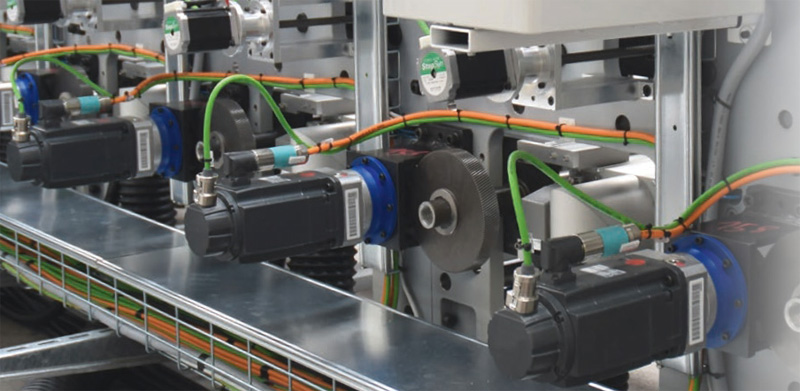
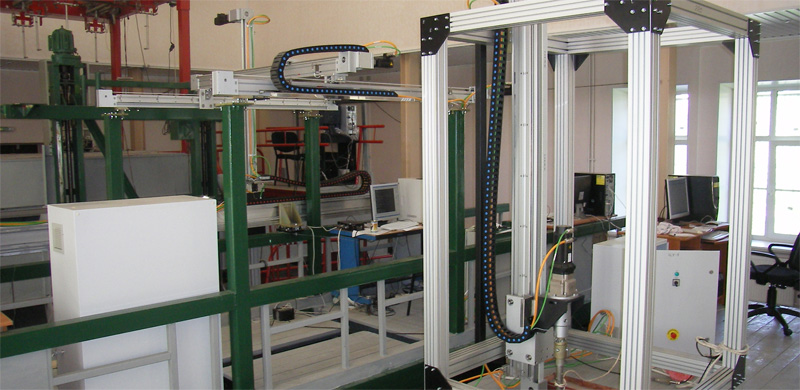
Сервоприводы — в действии
Сервоприводы и сервомоторы для ЧПУ — в Сервотехнике!
Компания «Сервотехника» более 20 лет поставляет серводвигатели (сервомоторы) следующих производителей: асинхронные серводвигатели Fukuta, серводвигатели фирмы KEB (Германия), сервомоторы компании LS Mecapion и сервоприводы Wittenstein. Имеются собственные разработки серводвигателей, производимые внутри России на собственном заводе. Вся продукция сертифицирована и имеет официальную сервисную гарантию
Купить — Сервопривод (серводвигатель)
В Сервотехнике – Вы можете купить комплектные сервоприводы, серводвигатели/сервомоторы, высоконадежные промышленные частотные преобразователи, редукторы и мотор редукторы известных европейских производителей.
Данный механизм получил достаточно широкое применение в различных промышленных сферах. Например, чаще всего его можно увидеть в конструкциях станков/машин для создания таких материалов/предметов и их обработки как:
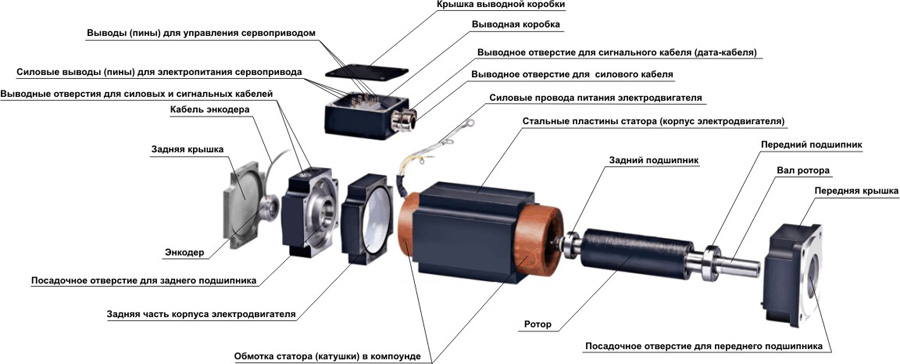
Устройство
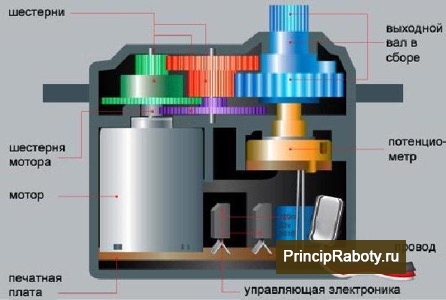
Рисунок 2. Устройство сервопривода
Сервопривод включает в свой состав такие элементы как:
Интересно, что самый простой управляющий блок чаще всего создаётся с использованием схемы сравнений значений на датчике и необходимых значений при подаче напряжения определённой полярности на привод.
Сервоприводы могут быть произведены в самых различных комплектациях. Эти устройства разделяют по принципу движения:
Вращательное
Представлено двумя вариациями: синхронной и асинхронной. Синхронный вариант помогает задать высокоточные параметры скорости вращения, углов поворота и ускорения. По сравнению с асинхронным скорость набирают быстрее, поэтому и стоят больше;
Асинхронный привод отличается способностью поддержания с большой точностью необходимой скорости даже в условиях низких оборотов.
Линейное
Также делится на два варианта: плоские и круглые. Двигатели данного типа развивают достаточно высокое ускорение (70 метров в секунду).
Ещё их выделяют по способу действия:
- Электромеханические механизмы – формирование движений происходит за счёт электродвигателя с редуктором;
- Электрогидромеханические – у них любое движение создаётся с участием системы поршня-цилиндра. В сравнении с электромеханическим приводом они обладают отличительно высоким быстродействием.
Сервопривод нашел широкое применение в робототехнике и манипуляторах. При создании небольших механизмов используют сервопривод mg995 и ему подобные.
Виды сервопривода
Сервоприводы подразделяют на электромеханические. В них механизм состоит из электродвигателя и редуктора. Отличаются относительно невысоким быстродействием.
Различают по типу примененного двигателя:
- синхронные, имеют высокую точность вращения выходного вала, быстро набираю обороты;
- асинхронные, отличаются стабильным вращением вала;
- с коллекторным двигателем постоянного или переменного тока (универсальным).
Сервоприводы, где движущим механизмом является поршень с цилиндром, имеют высокое быстродействие. Применяется в автомобиле для переключения скоростей в АКПП. Монтируется в роботах, перемещающих грузы более ста килограмм. В промышленных установках, для переключения заслонок в упаковочных автоматах, где в качестве энергоносителя применяют сжатый воздух.
Основные характеристики сервопривода:
В электромеханическом сервоприводе применяются электродвигатели с сердечником, при работе которых возникает вибрация, когда происходит вращение маятника. Это уменьшает точность поворота выходного вала. Лишены этого недостатка моторы с минимальной кинетической энергией ротора. Такие привода необходимы для ЧПУ станка, чтобы точно установить исполнительный механизм. Однако, они дороже двигателей с сердечником.
Самым распространенным редуктором является шестеренчатый, который предназначен для понижения частоты вращения и увеличения момента на выходном валу. Реже применяют привод с червячным редуктором, который имеет большое передаточное число, но дороже и сложнее в производстве.
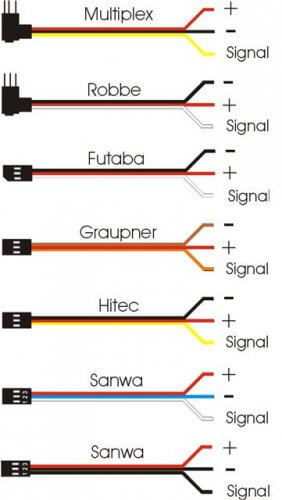
Двигатель с установленным редуктором может иметь всего три или четыре провода, идущих от него. По двум проводам подается питание на двигатель, с третьего — снимается сигнал от датчика, четвертый может быть предназначен для питания датчика.
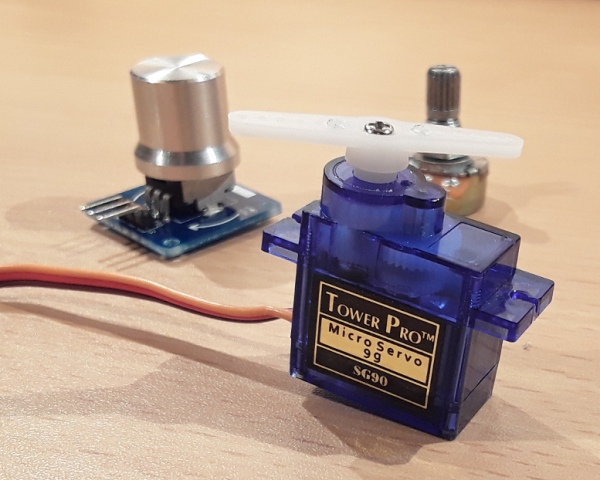
Слаботочные сервоприводы под управлением ардуино (micro servo motor) широко применяются сегодня в любительской робототехнике, на их основе делают небольшие настольные станки и множество других интересных и полезных в хозяйстве вещей. Даже просто на уровне хобби такие сервоприводы находят массу разнообразных применений. Давайте посмотрим, что же такое сервопривод в простейшем виде, как он принципиально устроен и как работает.
Само слово «сервопривод» можно перевести как «следящий привод». То есть это такое приводящее устройство, которое содержит в себе двигатель, управляемый посредством отрицательной обратной связи, что позволяет осуществлять точные движения с выверенным позиционированием рабочего органа.
В принципе сервоприводом можно назвать электродвигатель, в системе управления которым имеется датчик положения рабочего устройства (или просто вала), текущие параметры с которого определяют то, как, куда и на сколько должен или не должен повернуться ротор мотора для получения нужного результата. Обычно в такой системе имеется блок управления приводом, который анализирует параметры с датчика, и в соответствии с ними управляет питанием двигателя.
Таким образом, сервопривод хотя и работает автоматически, процесс позиционирования рабочего органа оказывается при этом очень точным благодаря правильной обработке сигнала с датчика платой управления. Например целью управления может быть просто поддержание определенного значения конкретного параметра упомянутого датчика. Вот и становится понятно, почему привод называется следящим — он следит за состоянием датчика.
Двигатель с установленным редуктором может иметь всего три или четыре провода, идущих от него. По двум проводам подается питание на двигатель, с третьего — снимается сигнал от датчика, четвертый может быть предназначен для питания датчика.
Обычно провода питания имеют красный и черный или красный и коричневый цвета — это плюсовой и минусовой (земля) провода питания. Белый или желтый — сигнальный провод с датчика, через этот провод на плату управления приходит сигнал обратной связи о текущем состоянии системы.
Простой сервопривод с редуктором (сервомашинка) и потенциометром — замечательный пример для того чтобы понять принцип работы обратной связи в системе управления сервоприводом.
Потенциометр имеет три вывода. На те выводы что по бокам — подается питание, а средний по сути — выход с резистивного делителя напряжения. Если изменить положение ручки потенциометра, то величина напряжения между минусом питания и средним его выводом измениться пропорционально изменению сопротивления между минусом и средним выводом.
Допустим, в крайнем левом положении напряжение на среднем выводе потенциометра будет минимальным, а в крайнем правом — максимальным. Получается что напряжение на среднем выводе потенциометра определяется положением его ручки, то есть тем, на какой угол она повернута от исходного положения, в котором напряжение на среднем выводе минимально. Обычно используют потенциометры с номинальным сопротивлением 5-10 кОм.
И как же здесь работает сервопривод? Ручка потенциометра в данном сервоприводе через редуктор соединена с валом двигателя. Значит, когда двигатель работает и его ротор вращается, ручка потенциометра поворачивается и следовательно сопротивление на среднем его выводе изменяется.
В крайнем левом положении, например, на среднем выводе будет 0 вольт, в среднем положении — 2,5 вольт, а в крайнем правом — 5 вольт. Для упрощения примем, что ручка потенциометра способна вращаться вокруг своей оси на 180 градусов, значит 2,5 вольта на среднем выводе будет соответствовать повороту ручки на 90 градусов.
Если плата управления получает информацию, что на среднем выводе 5 вольт, а необходимо создать поворот до 90 градусов, то к двигателю начнет автоматически подаваться питание определенной полярности до тех пор, пока он, поворачивая выход редуктора (а в месте с ним и ручку потенциометра) справа — налево, не доведет потенциометр до требуемого положения. Как только на среднем выводе потенциометра станет 2,5 вольт, двигатель прекратит получать питание от платы управления.
Аналогичным образом будет реализован поворот в другую сторону: если на среднем выводе 0 вольт, то полярность питания двигателя будет такой, что ручка потенциометра станет поворачиваться через редуктор слева — направо, пока напряжение не достигнет 2,5 вольт, соответствующих повороту ручки на 90 градусов. Это достаточно грубый пример, зато он достаточно нагляден.
Редуктор здесь необходим для того, чтобы высокие обороты вала маломощного мотора преобразовать в малые обороты с большим усилием, что позволит, во-первых, провернуть потенциометр, во-вторых, сделать это медленно и точно. Редуктор состоит из шестеренок, на валу двигателя находится маленькая, которая вращает большую, в центре которой маленькая и т. д.
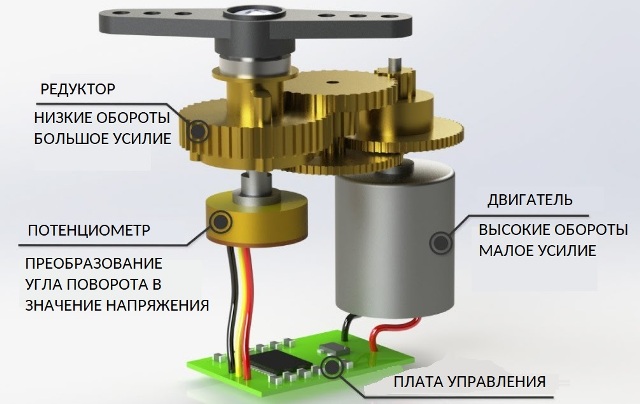
Сервоприводы характеризуются несколькими главными параметрами. Первый главный параметр — усилие на валу (вращающий момент, деленный на ускорение свободного падения), которое измеряется у маленьких моделей в кг/см и определяется при номинальном напряжении питания мотора. Например, вращающий момент в 10 кг/см означает, что при расстоянии до оси выходного вала в 1 см, на нем можно удержать груз массой 10 кг.
Второй немаловажный параметр — скорость поворота, которая указывается в сек/60 градусов. Этот параметр показывает, сколько времени требуется сервоприводу для поворота его выходного вала на 60 градусов. Например 0,2сек/60 градусов. Далее идут такие параметры как напряжение питания, угол вращения (180 или 360 градусов) и тип редуктора (материал шестерней).
Источник — http://www.asutpp.ru/chto-takoe-servoprivod.html
Источник — http://academy.evolvector.ru/index.php?route=product/product&product_id=73
Источник — http://promplace.ru/servodvigateli-894.htm
Источник — http://modelistam.com.ua/kakustroen-servoprivod-printsip-raboty-a-164/
Источник — http://tehprivod.su/poleznaya-informatsiya/printsipy-raboty-i-vidy-servoprivodov.html
Источник — http://www.servotechnica.ru/catalog/type/index.pl?id=104
Источник — http://infograb.ru/princzip-raboty-servoprivoda-chto-takoe-servoprivod/
Источник — http://samelectrik.ru/chto-takoe-servoprivod.html
Источник — http://electrik.info/device/1583-kak-ustroen-i-rabotaet-servoprivod.html