Квадратура выхода (выходы А и В)
Принцип работы инкрементного энкодера
Импульсный (пошаговый) энкодер относится к типу энкодеров, которые предназначены для указания направления движения и/или углового перемещения внешнего механизма. Пошаговый энкодер периодически формирует импульсы, соответствующие углу вращения вала. Этот тип энкодеров, в отличие от абсолютных, не формирует выходные импульсы, когда его вал находится в покое. Пошаговый энкодер связан со счетным устройством, это необходимо для подсчета импульсов и преобразования их в меру перемещения вала.
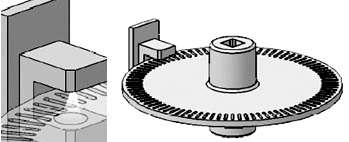
Пошаговый оптический энкодер состоит из следующих компонентов: источника света, диска с метками, фототранзисторной сборки и схемы обработки сигнала. Диск пошагового энкодера подразделен на точно позиционированные отметки. Количество отметок определяет количество импульсов за один оборот. К примеру, если диск поделен на 1000 меток, тогда за 250 импульсов вал должен повернуться на 90 градусов.

Диск с метками инкрементного энкодера
Квадратура выхода (выходы А и В)
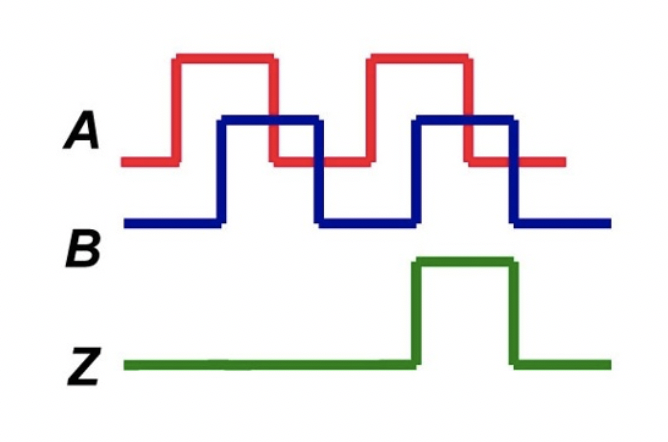
Для квадратуры выхода энкодера используются два выходных канала, для того чтобы определить — вращается вал по часовой стрелке или против часовой стрелки, основанное на сдвиге фазы 90°±0° , допуск ±45° — приемлемый для спецификации сдвига фазы. Энкодер с единственным выходом (A) более известен как тахометр.
Максимальная частота ответа
Максимальная частота ответа является частотой, при которой вращающийся энкодер может дать электрический ответ. Такая частота имеет отношение к количеству выходных импульсов, на которые энкодер реагирует в секунду. Следовательно, энкодер пошагового типа должен удовлетворить следующее отношение: (rpm/60) x (разрешение) ≤ максимальной частоты ответа.
Указатель нулевой отметки (канал Z)
В энкодере, имеющем этот канал, импульс появляется на выходе в каждом обороте вала. Функция показателя нуля может использоваться для сброса внешне связанного счетчика или для регистрации начальной (нулевой) позиции.
Разрешение — это количество выходных импульсов за вращение вала.
Соединительный вал
При разнообразии схемных решений, выходные сигналы инкрементальных энкодеров имеют один из двух форматов, в зависимости от напряжения питания датчика и выбора пользователя: TTL/RS422 или HTL/push-pull. Все устройства работают в пределах стандарта интерфейса IO-Link, выполняя, в зависимости от степени «интеллектуальности» три вида связи в системе:
Принципы работы инкрементальных энкодеров
Инкриментальный энкодер неприхотливый в обслуживании прибор. Инкриментальный энкодер универсальный датчик применимый в большинстве сфер производства.
Применяется в основном два физических принципа реализации энкодера:
При разнообразии схемных решений, выходные сигналы инкрементальных энкодеров имеют один из двух форматов, в зависимости от напряжения питания датчика и выбора пользователя: TTL/RS422 или HTL/push-pull. Все устройства работают в пределах стандарта интерфейса IO-Link, выполняя, в зависимости от степени «интеллектуальности» три вида связи в системе:
- коммутационное (бинарное) состояние (как простой датчик контактного типа);
- циклическая цифровая передача результатов измерения;
- прием программируемых параметров датчика и передача результатов его диагностики (например – перегрузка, перегрев и т.п.).
По точности и свойствам разрешения магнитный вид датчика уступает фотоэлектрическому, однако по конструкции он проще, менее требователен к условиям работы и пространству. Магнитный энкодер является прибором, который фиксирует прохождение магнитного полюса магнита при вращении, находящегося рядом с чувствительным элементом. Информация передатчика выражается в цифровом коде.
Коротко энкодеры можно назвать преобразователями угловых перемещений. Они служат для модификации угла поворота объекта вращения, например, вала какого-либо механизма, в сигнал электрического тока. При этом определяется не только угол поворота вала, но и его направление вращения, а также скорость вращения и текущая позиция относительно первоначального положения.
Наиболее популярными энкодеры стали при их использовании в системах точного перемещения, на станкостроительных заводах, в производственных комплексах с применением робототехники, в измерительных устройствах, в которых необходима регистрация точных измерений наклонов, поворотов, вращений и углов.
Виды и принцип действия

Энкодеры – это датчики поворота. Простейший датчик имеет ручку, которая может поворачиваться по часовой стрелке или против нее. В зависимости от угла поворота и направления выдается цифровой сигнал, информирующий о том, в каком положении находится ручка, либо в какую сторону она была повернута.
У такого энкодера, показанного на рисунке, ручка также может применяться в качестве кнопки. Это является вспомогательной функцией конкретного вида энкодера.
По типу выдаваемых данных энкодеры делятся на две большие группы:
- Абсолютные.
- Инкрементальные.
Абсолютные энкодеры
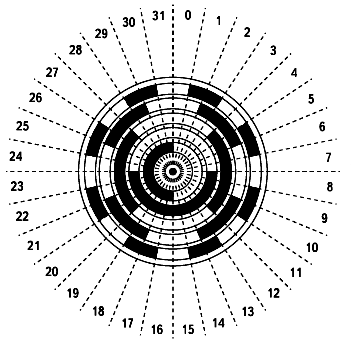
Если вал энкодера поворачивать в другую сторону, то он начнет выдавать противоположные значения. В нашем случае у него используется пять выводов для выдачи значений поворота.
У данного алгоритма имеются свои недостатки. Из таблицы 1 виден порядок выдаваемых значений n-го энкодера. Стоит обратить внимание на две последние строчки, переход от 127 на 128.
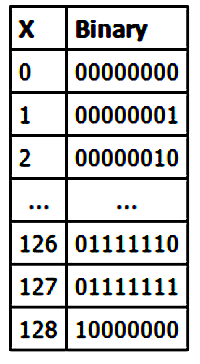
Таблица 1
Здесь меняются абсолютно все биты. В идеальном энкодере они все меняются одновременно и нет никаких проблем. Практически в реальном энкодере биты меняются быстро, однако не одновременно. И в какой-то момент на выходе энкодера оказывается совершенно произвольное значение. Так как меняются все биты, следовательно, у энкодера будет произвольное значение от нуля до всех единиц.
Справа изображен пример такого переключения. Чем это может грозить? Разберем пример. Микроконтроллер с помощью двигателя управляет валом и поворачивает его на определенный угол. В определенный момент при переключении со 127 на 128 ячейку он получает определенное случайное значение. Контроллер делает вывод, что вал находится совершенно в другом месте, в отличие от фактического места, и начинает его вращать в другую сторону, с другой скоростью и т.д.
Через определенное время микроконтроллер получает правильное значение, начинает пытаться остановить вал и вращать его в правильную сторону. Такой процесс может продолжаться долго, при условии, что такая ошибка будет встречаться часто. Такие ошибки являются нерегулярными, и вычислить их достаточно сложно.
Код Грея
Выше описанная проблема решается с помощью введения кода Грея. Особенностью кода Грея является то, что при переключении энкодера на единицу, значение кода Грея меняется также на единицу. Меняется только один вид. Это видно в таблице 2 в сравнении двоичного кода и кода Грея.
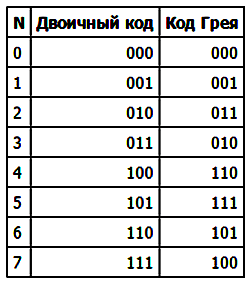
Таблица 2
Первые две строчки совпадают, но уже во второй строчке поменялся средний бит. Далее также меняется один бит. Также стоит отметить, что последний и первый код Грея отличается на один бит, то есть код Грея может зациклиться.
Преимуществом данного кода является то, что ошибка, которая рассмотрена выше, невозможна. Из недостатков можно отметить, что микроконтроллеру необходимо переводить код Грея в двоичный код для того, чтобы понять, в каком положении находится абсолютный энкодер.
Инкрементальные энкодеры
Следующим типом является инкрементальный энкодер, который имеет более простую структуру. Но при этом он не показывает конкретное место положения своей ручки. Он показывает только направление поворота, а число делений поворота должен считать микроконтроллер.
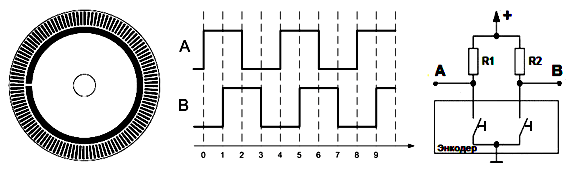
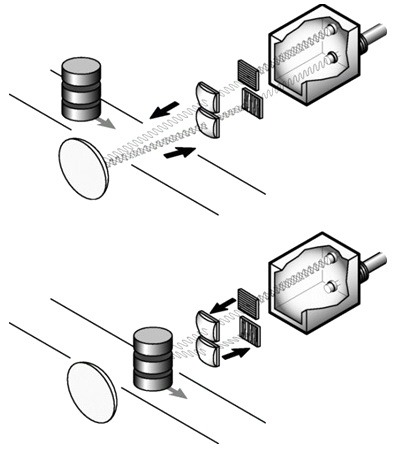
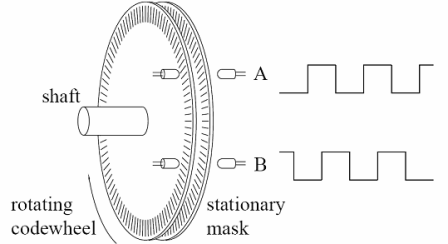
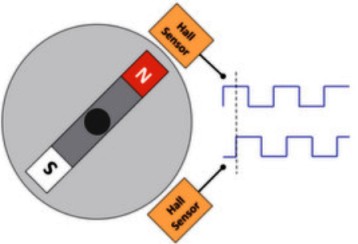
У инкрементального энкодера есть набор полосок, которые по умолчанию подключены к земле, и при повороте они замыкаются и размыкаются. Получается сигнал, изображенный на рисунке (похож на меандр). Таких круговых полосок у энкодера две. Полоски смещены на одну четверть, и сигналы также смещены между собой на четверть. Это важно, так как позволяет определить направление вращения.
Схему инкрементального энкодера можно представить по правому рисунку. Кнопки обозначают периодические подключения энкодера к земле. Так как внутри энкодер не подключается к логической единице, то необходимо снаружи самостоятельно подтянуть логические единицы через резисторы к выводу энкодера. В этом случае, когда ни одна из ножек у энкодера не подключена к земле, на ножках будет логическая единица.
Если энкодер подключил к земле какую-то ножку, то на этой ножке будет логический ноль. В спокойном состоянии у энкодера на выходе логическая единица. При начале вращения энкодера в любую сторону, то сначала один вывод подключается к земле, затем другой. Далее эти выводы по очереди отключаются от земли, и на них опять образуется логическая единица.
Определить направление поворота можно по тому, какой из выводов раньше подключился к земле. При подсчете полных циклов можно посчитать количество щелчков поворота энкодера.
Фактически у энкодера имеется четыре состояния:
- Две единицы.
- Ноль и единица.
- Ноль и ноль.
- Единица и ноль.
Три состояния, которые не равны единицам, являются неустойчивыми, и в них энкодер не может находиться. Во многих микроконтроллерах реализована функция подсчета поворотов с помощью таймеров, у которых есть определенные входы. Таймер считает на аппаратном уровне, на сколько щелчков и в какую сторону был повернут энкодер, и выдает значение. То есть, счетчик инкрементирует какое-либо число.
По изменению этого числа можно определить, на сколько щелчков был повернут энкодер. По количеству щелчков можно определить и угол поворота. Энкодер также имеет дребезг контактов, который усложняет анализ сигналов.
Оптические энкодеры
Подобный преобразователь выполнен в виде диска, зафиксированного на валу, и изготовленного из стекла. Оптический датчик поворота отличается от других видов дополнительным оптическим растором, перемещаемым при повороте вала. При этом он превращает момент вращения в световой поток, который далее принимается фотодатчиком.
Оптический преобразователь запоминает углы вращения. При этом каждому отдельному положению соответствует особый цифровой код, который вместе с числом оборотов образует единицу измерения датчика. Энкодер подключается и работает по аналогии с инкрементальным датчиком.
По характеру функционирования они разделяются на фотоэлектрические и магнитные . Принцип работы магнитных основан на использовании эффекта Холла, который был впервые открыт в 1879 году. При этом разность потенциалов появляется только при расположении провода постоянного тока в магнитное поле.
По точности и свойствам разрешения магнитный вид датчика уступает фотоэлектрическому, однако по конструкции он проще, менее требователен к условиям работы и пространству. Магнитный энкодер является прибором, который фиксирует прохождение магнитного полюса магнита при вращении, находящегося рядом с чувствительным элементом. Информация передатчика выражается в цифровом коде.
Фотоэлектрический энкодер является датчиком, работающим на основе фотоэлектрического принципа. Этот эффект наблюдается при воздействии светового потока на вещество. Этот принцип был открыт в 1887 году. При эксплуатации такого датчика происходит постоянное преобразование луча света в сигнал электрического тока.
Аналогами фотоэлектрического энкодера являются оптоэлектронный, оптический и оптронный. Эти датчики наиболее чувствительны к характеристикам изготовления, эксплуатации и другим факторам, по сравнению с другими моделями. Однако это оправдывается их повышенной точностью, в отличие от конкурентов.
Прибор разработан как универсальный, настраиваемый в соответствии с широким спектром задач сенсор. Выделяют три обширные области использования в зависимости от внешних условий:
Как работает инкрементальный энкодер
Применение инкрементальных энкодеров
Прибор разработан как универсальный, настраиваемый в соответствии с широким спектром задач сенсор. Выделяют три обширные области использования в зависимости от внешних условий:
Оптические угловые энкодеры
Используют метод прохождения света через специальный индикаторный растр (шкалу) для определения положения вала, следовательно, объекта.
Самую простую конструкцию среди оптических угловых датчиков имеет модель с «щелевой» (по принципу расчески) маской (индикаторной пластиной), но существует ряд других исполнений, которые обеспечивают еще большую стабильность и эффективность работы.
Существуют также такие разновидности энкодеров, как резисторные, магнитные, оптические. Энкодеры могут работать через производственную сеть или шинные интерфейсы.
Также энкодеры разделяются на два типа – абсолютные и инкрементальные датчики перемещения. В этой статье мы подробно рассмотрим характеристики инкрементального энкодера.
Итак, инкрементальный энкодер – это прибор, который выдает импульсы, означающие изменение его положения. Инкрементальный датчик перемещения за один свой оборот выдает определенное число сигналов, в то время как абсолютный датчик перемещения позволяет знать текущий угол поворота в любой момент времени даже после пропадания электропитания. Многооборотные энкодеры также могут «запоминать» количество полных оборотов оси вращения.
Существуют также такие разновидности энкодеров, как резисторные, магнитные, оптические. Энкодеры могут работать через производственную сеть или шинные интерфейсы.
В каталоге нашего сайта можно ознакомиться с описанием продукции, где также представлены магнитный энкодер, линейный энкодер, энкодер оптический, цена на который является выгодным предложением на рынке. Для заказа продукции или консультации по стоимости необходимо заполнить простую форму онлайн-заявки внизу страницы.
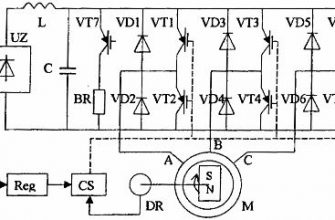
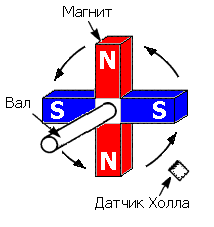
В магнитном энкодере высокоскоростное вращение внешнего вала, на котором закреплен цилиндрический постоянный магнит, воспринимается датчиком Холла, совмещенным на одном полупроводниковом кристалле с контроллером обработки сигналов.
Позиционирование в различных видах промышленного оборудования обеспечивается с использованием простых с виду устройств — энкодеров (или, по-другому, датчиков угла поворота).
Энкодеры используются для преобразования линейного или вращательного движения в двоичный цифровой сигнал. Энкодер представляет собой устройство, вал которого соединяется с вращающимся валом исследуемого объекта, и обеспечивает электронный контроль угла поворота последнего. По принципу действия энкодеры подразделяются на оптические и магнитные.
На валу оптического энкодера установлен диск с окнами прерывания по периметру, напротив которых размещены светодиод и фототранзистор, обеспечивающие формирование выходного сигнала в виде последовательности прямоугольных импульсов с частотой, пропорциональной как количеству окон прерывания, так и скорости вращения диска/вала. Количество импульсов отображает угол поворота.
Оптические энкодеры выпускаются в виде инкрементальных и абсолютных датчиков.
Инкрементальные энкодеры имеют диск прерывания с множеством окон одинакового размера на основном радиусе и две считывающих оптопары, что позволяет фиксировать как угол поворота, так и направление вращения вала. На вспомогательном радиусе диска размещено единственное окно прерывания и соответствующая оптопара, определяющие исходное положение (начало отсчета).
Отрицательный момент — инкрементальные энкодеры выдают относительный отсчет угла поворота, информация о котором не сохраняется при остановке вращения. К их преимуществам следует отнести простоту конструкции (и, соответственно, невысокую стоимость) при высоком разрешении и высокой рабочей частоте.
Инкрементальные энкодеры повышенной стойкости ориентированы на индустриальное применение — в машиностроении, прокатных станах, судостроении, текстильной, обувной промышленности, в деревообработке. Для таких энкодеров определяющими являются параметры — разрешение по углу поворота, способность работать на высоких частотах, высокая степень защиты, чтобы противостоять условиям неблагоприятной среды.
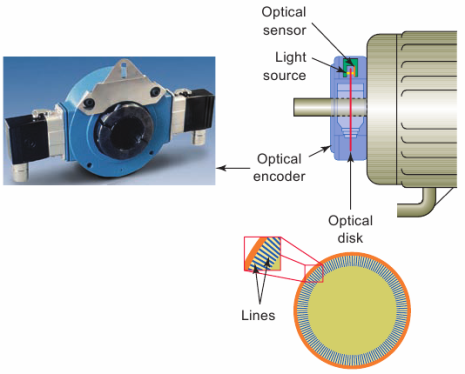
Диск с линиями или прорезями, которые прерывают луч света на оптический датчик. Электронная схема подсчитывает прерывания луча и генерирует цифровые выходные импульсы энкодера.
Кодирующий диск — устройство для преобразования в цифровую форму величин угловых перемещений вала. На кодирующий диск наносится геометрическое изображение цифрового кода. Знаки разрядов кода наносятся на концентрической дорожки, причем ближе к периферии располагаются младшие (менее значащие) разряды.
В зависимости от способа съема кода (контактного, фотоэлектрического, электромагнитного, индукционного, электростатического и т. п.) геометрическое изображение кода составляется из участков электропроводящих и электроизолированных, прозрачных и непрозрачных, магнитных и немагнитных и т. п.
Преимущественно распространение получили кодирующие диски с разновидностями двоичного кода, исключающими возникновение ошибок при переходе через границы отдельных дискретных участков, когда некоторые разряды могут считываться по одну сторону границы, а некоторые — по другую (из-за неточной установки съемных устройств или из-за неодновременном считывания кода в процессе вращения диска. К числу таких кодов относятся т. н. фау-код (код Баркера) и рефлексный код (код Грея).
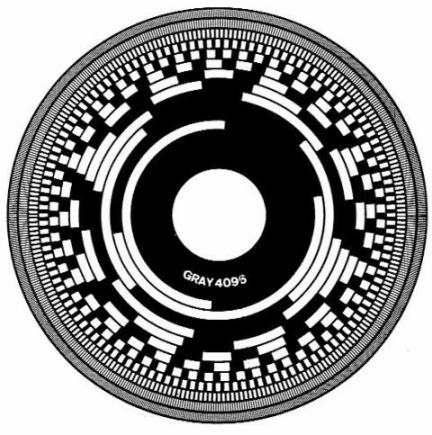
В некоторых оптических поворотных энкодерах используется отражательный кодирующий диск. На этом диске чередуются секции, которые поглощают свет или отражают его, а источник света вместе с приемником располагаются с одной стороны диска. При наличии только одного источника и приемника света последовательность импульсов от датчика позволяет выяснить, на сколько шагов повернулся диск относительно своего предыдущего положения.
Одиночный датчик не может указывать направление вращения, но если добавить вторую пару «источник приемник», отстоящую по фазе на 90 о от первой, то микроконтроллер по разности фаз между последовательностями импульсов сможет определить направление вращения диска.
Следует помнить, что любая система, которая определяет относительное вращение диска, но не может измерить его абсолютное угловое положение, является инкрементным датчиком.
Абсолютный энкодер имеет диск прерывания с концентрическими окнами на разных радиусах, относительные размеры которых определяются двоичным кодом, и которые считываются одновременно, давая кодированный выходной сигнал для каждой угловой позиции (код Грея, бинарный код. ).
В данном случае имеется возможность получать данные о мгновенном положении вала без цифрового счетчика или возврата к исходному положению, так как на выходе имеется кодированное слово — «n bit», защищенное от электрических шумов.
Абсолютные энкодеры используются в приложениях, требующих обязательного сохранения поступающих данных в течение продолжительного времени, при этом они сложнее по конструкции и являются более дорогостоящими.
Абсолютные энкодеры с интерфейсом полевой шины имеют выходной интерфейс связи с полевой шиной по стандарту CANopen, ProfiBus, DeviceNet, Ethernet, InterBus и используют бинарный код при определении угла поворота. Вышеуказанные интерфейсы связи программируются по ряду параметров: например, направление вращения, разрешение по импульсам на один оборот, скорость передачи данных.

Энкодеры, установленные на валу электродвигателя , эффективно обеспечивают управление точным позиционированием. Такие энкодеры обычно изготавливаются в варианте «отверстие» и важными элементами их конструкции являются специальные муфты, позволяющие компенсировать люфты вала двигателя.
Позиционирование в вышеуказанных условиях наиболее эффективно обеспечивает магнитный энкодер , в котором преобразование углового перемещения вала в электронный сигнал реализуется бесконтактно на основе эффекта Холла, не связано с вращением оптического прерывателя внутри датчика, и допускает обработку сигналов на скоростях до 60000 об/мин.
В магнитном энкодере высокоскоростное вращение внешнего вала, на котором закреплен цилиндрический постоянный магнит, воспринимается датчиком Холла, совмещенным на одном полупроводниковом кристалле с контроллером обработки сигналов.
При вращении полюсов постоянного магнита над микросхемой с датчиком Холла переменный вектор магнитной индукции наводит напряжение Холла, содержащее информацию о мгновенном значении угла поворота вала. Микроконтроллер обеспечивает быстрое преобразование напряжения Холла в параметр угла позиционирования.

Возможность такого преобразования без непосредственного механического соединения элементов магнита и датчика Холла является основным преимуществом магнитных энкодеров, обеспечивает им высокую надежность и долговечность, и позволяет эффективно работать в высокоскоростных приложениях, связанных с промышленной автоматизацией, полиграфией, металлообработкой, инструментально-измерительным оборудованием.
Сделайте небольшой донат на развитие сайта «Школа для электрика»!
Абсолютные оптические устройства схожи, но используют другой тип шкалы, где абсолютная позиция определяется при подключении питания – без необходимости в точке отсчета. Как правило, у этих датчиков цифровой выход, и разрешение определяется количеством битов в выходном сигнале. 10-битные устройства могут предоставить 1024 отсчета, 11-битные – 2048 отсчетов и т.д.
| Инкрементальный или абсолютный датчик положения? |
_reg.jpg) |
Даррен Крейт (Darran Kreit), Zettlex, для Automation.com
Большинство инженеров при решении задач определения положения по-прежнему используют инкрементальные датчики положения. Отчасти это происходит из-за преобладающего убеждения в том, что абсолютные датчики положения слишком сложны и дорогостоящи. В данной статье описываются оба подхода и относительные преимущества каждого из них.
Понимание разницы между инкрементальными и абсолютными техниками измерения, порой, оказывается нетривиальной задачей. Помимо необходимости разбираться в терминологии, связанной с определением положения, инженерам приходится иметь дело с порой противоречивыми заявлениями от производителей, которые, нет-нет, да и заявят, что тот или иной продукт является абсолютным датчиком положения – хотя, на самом деле, он инкрементальный.
В этой статье мы используем термин «датчик» как собирательный для энкодеров, преобразователей и детекторов.
Определения: инкрементальный и абсолютный
Основной особенностью инкрементального датчика положения является то, что он сообщает о величине изменения положения. Другими словами, после того, как на датчик подается питание, он не сможет сообщить о положении до тех пор, пока ему не дадут точку отсчета.
Абсолютный датчик положения генерирует однозначную информацию о своем положении, с помощью специальной шкалы. Когда на датчик подается питание, он сообщит о своем положении, и ему для этого не нужна точка отсчета. «Что произойдет при подаче напряжения?» — ответ на это вопрос является хорошим тестом для различения двух типов датчиков. Если датчику нужна какая-то калибровка – это инкрементальный датчик. Если нет – это абсолютный датчик.
Некоторые производители датчиков заявляют об «абсолютном» функционале своих продуктов, на том основании, что аккумуляторная батарея позволяет хранить информацию о положении, когда питание инкрементального датчика отключается или пропадает. Но, что произойдет, когда батарея будет разряжена?
Другие производители заявляют об «абсолютном» функционале своих инкрементальных датчиков, потому, что им надо совсем немного энергии, для того, чтобы получить точку отсчета. Все равно, это – инкрементальные датчики, хотя их и продают как абсолютные – с соответствующими ценами.
Потенциометры: проблемы износа и надежности
Хотя основанные на потенциометрах датчики положения все еще являются самым обыкновенным их типом, за последние 30 лет значительное распространение получили бесконтактные датчики. Этот тренд порожден проблемами, связанными с износом и надежностью потенциометров – особенно в жестких условиях (прежде всего связанных с вибрацией) или при долгих сроках службы.
Почти все потенциометры являются абсолютными, однако обычной формой бесконтактных датчиков являются оптические энкодеры. Их принцип работы основан на использовании луча света, направленного сквозь или на специальную решетку. Положение вычисляется исходя из интенсивности отраженного или преломленного света. Большинство оптических устройств являются инкрементальными. Положение определяется с помощью серии так называемых А/В импульсов. Также есть канал Z, дающий один импульс на оборот, в качестве референса.
Абсолютные оптические устройства схожи, но используют другой тип шкалы, где абсолютная позиция определяется при подключении питания – без необходимости в точке отсчета. Как правило, у этих датчиков цифровой выход, и разрешение определяется количеством битов в выходном сигнале. 10-битные устройства могут предоставить 1024 отсчета, 11-битные – 2048 отсчетов и т.д.
Сейчас продается в три раза больше инкрементальных датчиков, чем абсолютных. Основная причина – инкрементальные датчики, как правило, дешевле абсолютных, при сравнимых характеристиках.
Однако, сегодня абсолютные датчики не так дороги, как многие продолжают считать. Переход к (бесконтактным) абсолютным изменениям положения может существенно улучшить производительность, повысить точность и снизить общие расходы. Это связано с тем, что с инкрементальными датчиками связан ряд технических проблем.
Самая очевидная заключается в том, что каждый раз при отключении питания понадобится калибровка – это замедляет производственные процессы, а также может иметь последствия, связанные с безопасностью, если питание пропало неожиданно.
Разница в цене между абсолютными и инкрементальными датчиками сокращается, частично из-за постепенного распространения абсолютных датчиков, и, главное – из-за внедрения новых технологий для абсолютных датчиков. Конечно, оптические датчики по-прежнему остаются «устройствами выбора» для большинства инженеров, однако индукционные устройства нового поколения позволяют создавать точные абсолютные датчики положения, устойчивые к жестким условиям внешней среды.
Энкодеры имеют широкую сферу применения в печатной промышленности, металлообработке, лифтовой технике, автоматах для фасовки, упаковки и розлива, в испытательных стендах, а также в роботах и прочих машинах, требующих точной регистрации показателей движения частей. Они практически полностью заменили широко распространенные ранее сельсины.

В данном устройстве механическое движение преобразовывается в электрические сигналы, определяющие положение объекта, дают информацию об угле поворота вала, его положении и направлении вращения. С помощью энкодера также можно измерить длину и расстояние или установить перемещение инструмента.
Энкодеры имеют широкую сферу применения в печатной промышленности, металлообработке, лифтовой технике, автоматах для фасовки, упаковки и розлива, в испытательных стендах, а также в роботах и прочих машинах, требующих точной регистрации показателей движения частей. Они практически полностью заменили широко распространенные ранее сельсины.
Типы энкодеров
Выделяют следующие типы энкодеров: инкрементальные (инкрементные) и абсолютные.
Инкрементальный энкодер
Абсолютный энкодер
Классификация по принципу действия
По принципу действия энкодеры различают:
- оптические
- магнитные
- магниторезисторные
Оптические
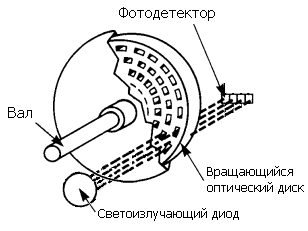
Конструкция оптического энкодера состоит из специального оптического диска, светоизлучающего диода и фотодетектора. Диск с нанесенной оптической шкалой (поверхность диска состоит из прозрачных и непрозрачных участков) жестко закрепляется на валу. При вращении объекта специальный датчик считывает информацию и преобразовывает ее в импульсы.
Магнитный энкодер включает в себя вал с магнитом и датчиком Холла, который регистрирует последовательность прохождения магнитных полюсов (северные и южные) и измеряет скорость и направление вращения.
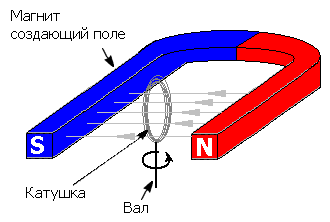
Магниторезистивный энкодер состоит из катушки помещенной в магнитное поле, катушка закрепляется на валу. При вращении катушки ее витки будут изменять положение относительно поля, они будут то пералельны полю, то перпенликулярны, соответсвенно ток в катушке будут меняться. Таким образом, протекащий через катушку ток будут изменяться в зависимости от угла поворота вала.
Параметры, на которые необходимо обратить внимание при выборе энкодеров
При выборе энкодера следует обратить внимание на следующие параметры:
Сейчас продается примерно в три раза больше инкрементальных датчиков, чем абсолютных. Основная причина в том, что инкрементальные датчики, как правило, дешевле абсолютных, при сравнимых характеристиках.
Потенциометры
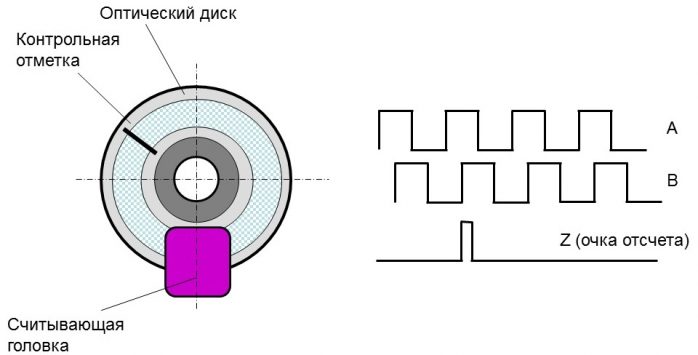
Рис. 1. Схема инкрементального оптического датчика с опорным импульсом
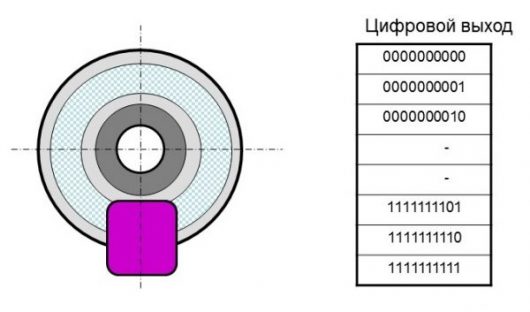
Рис. 2. Схема 10-битного абсолютного датчика с цифровым выходом
Сейчас продается примерно в три раза больше инкрементальных датчиков, чем абсолютных. Основная причина в том, что инкрементальные датчики, как правило, дешевле абсолютных, при сравнимых характеристиках.
В последнее время разница в цене между абсолютными и инкрементальными датчиками сокращается, частично из-за повышенного распространения абсолютных датчиков, но главное — из-за внедрения новых технологий на основе абсолютных датчиков. Конечно, большинство инженеров по-прежнему предпочитают оптические датчики, но индукционные устройства нового поколения позволяют создавать точные абсолютные датчики положения, устойчивые к неблагоприятным условиям эксплуатации.
При подключении энкодера к МК со встроенными подтягивающими резисторами, их можно исключить из схемы, не забыв при этом включить встроенные подтягивающие резисторы:
Также энкодеры идеально подходят для реализации навигации по различным меню.
Инкрементальные энкодеры бывают оптическими, магнитными, механическими и т.д. Вне зависимости от принципа устройства все инкрементальные энкодеры на выходе генерируют 2 линии ( A и B) с импульсами смещенными относительно друг друга. Именно по смещению импульсов можно судить о направлении вращения. А по количеству импульсов — об угле поворота.
В данной статье будет рассмотрен механический инкрементальный энкодер EC11 с переключателем ( кнопкой) и пошаговой фиксацией положения вала ( между каждой серией импульсов).
Каждый инкрементальный энкодер имеет следующую основную характеристику — дискретность ( количество шагов, положений между импульсами, на один оборот вала). Благодаря дискретности, можно вычислить угол единичного изменения положения. В нашем примере, энкодер ЕС11 за полный оборот генерирует 20 серий импульсов. А это значит, что каждый шаг эквивалентен повороту на 18°. Помимо этого, вал энкодера фиксируется в каждом положении между каждой серией импульсов.
Внешний вид устройства:
Сердцем энкодера являются 2 пары контактов и металлическая пластина с засечками. При вращении вала, каждая пара контактов замыкается и размыкается. Но эти пары контактов расположены таким образом, что при вращении вала в разные стороны порядок замыкания/размыкания контактов разный — и, благодаря этому, можно определить направление вращения.
Энкодер с кнопкой имеет 5 выходов — 2 выхода ( D и E) отвечают за переключатель ( кнопку), 1 ( С) — общий ( GND , земля), а оставшихся 2 ( A и B) — импульсные линии, сигнализирующие о вращении.
Поскольку подключение кнопки вала энкодера ( контакты D и E) не отличаются от подключения обычной кнопки, информация по ней будет опущена.
Схематично работу инкрементального энкодера можно представить следующим образом:
Как видно из рисунка, в состоянии покоя обе пары контактов разомкнуты, а значит сигнальные линии A и B пребывают в высокоомном состоянии ( состоянии Z). Поэтому их необходимо притягивать к логической единице подтягивающими резисторами. Стандартная схема подключения энкодера выглядит следующим образом:
После чего в состоянии покоя на обоих сигнальных выходах будет присутствовать логическая единица ( 5 В). При вращении по часовой, или против часовой стрелки на сигнальных линиях, с противоположным смещением друг относительно друга, будут появляться отрицательные импульсы — по одному на 1 шаг на каждой линии:
Реальная осциллограмма вращения энкодера немного отличается от идеальной.
При подключении энкодера к МК со встроенными подтягивающими резисторами, их можно исключить из схемы, не забыв при этом включить встроенные подтягивающие резисторы:
Как и в любой кнопке, контакты энкодера также подвержены дребезгу при смыкании/размыкании. И, поскольку, подавляющее большинство программных реализаций взаимодействия энкодера с Arduino использует прерывания, дребезг будет мешать корректной работе самого отлаженного и работоспособного кода.
Программное устранение дребезга
В отличие от программного устранения дребезга обычной кнопки дребезг энкодера можно устранить программно, при этом серьезно не нагружая ресурсы микроконтроллера. И программное устранение будет работать на прерываниях и флагах.
После того как энкодер подключен к Arduino ( на примере Arduino Uno):
Сигнальные линии энкодера подключены к 2 и 3 пину Arduino Uno, так как на этих выходах реализованы прерывания. Замена пинов подключения приведет к неработоспособности примера. Скетч:
Суть работы кода можно изобразить графически:
При корректном выполнении сценария, по завершению каждого шага переменная state будет иметь состояние 4 или -4 . Если что-то пойдет не так, программа никак не это не отреагирует. Но если программа увидит, что в состоянии покоя ( A=1 и B=1 ), переменная state не равна нулю, то вернет её в исходное состояние.
Аппаратное устранение дребезга
Несмотря на незатратное, по отношению к ресурсам МК, программное решение устранения дребезга на прерываниях, более предпочтительным является его аппаратное устранение. Решение строится по принципу устранения дребезга обычной кнопки и выглядит так:
О том, почему изменена полярность подключения и для чего необходим инвертирующий триггер Шмитта 74HC14N, можно почитать в статье Arduino: Дребезг — программное и аппаратное устранение.
После того, как дребезг подавлен аппаратно, программная реализация может быть значительно упрощена.
Дополнительным бонусом может служить высвобождение одного из двух ( для Arduino Uno) пинов с функционалом прерывания. Таким образом прерывание будет провоцироваться импульсом только одной линии, а далее, в обработчике, можно смотреть на состояние второй линии и делать выводы:
Этот пример работает корректно.
Навигация при помощи энкодера
Теперь можно организовать управление чем-либо при помощи энкодера. Его уникальность состоит в том, что одним элементом управления можно запрограммировать 4 реакции на действия: вращение вправо/влево, короткое нажатие и длинное нажатие ( реакция на нажатия реализуется программно).
В строках 59-67 можно настроить реакцию программы на длительное удержание кнопки энкодера:
Энкодер и навигация по меню
Для того чтобы продемонстрировать навигационные возможности энкодера необходимо создать меню. Для примера будем создавать такое меню:
Для этого объявим структуру menu одного пункта и далее, создадим массив из элементов структуры menu :
Скетч и результат работы выглядит так:
Бонус — как заменить энкодером кнопки
Задача выглядит следующим образом:
Сделать без участия микроконтроллера ( на микросхемах ТТЛ-логики) так, чтобы вращение энкодера конвертировалось в положительные импульсы на двух разных выходах — по часовой стрелке на одном выходе, против часовой — на другом, таким образом имитируя нажатия двух отдельных кнопок:
Для выполнения этой задачи понадобятся 2 микросхемы, реализующие стандартную логику и 1 микросхема — D-триггер ( D от англ. delay — задержка):
Система управления должна подсчитывать импульсы, чтобы вычислить угол поворота энкодера относительно точки отсчёта.
Как выбрать
Датчики линейного и кругового перемещения
- Перемещение
- Круговое (угловое)
- Линейное.
- Принцип действия
- Оптические, электромагнитные, механические
- Импульсные или непрерывные
- Инкрементальные или абсолютные.
- Разрешение
- Импульсов на оборот (для круговых)
- Миллиметров, микрон (для линейных).
- Круговые датчики
- Вал
- Конструкция вала (цельный, полый)
- Диаметр
- Подшипники (если нужны).
- Вал
- Инкрементальные энкодеры
- Тип выходного сигнала
- TTL 5В (RS-422)
- HTL 8..30В
- Sin/cos 1Vss
- Sin/cos 1Vpp.
- Тип выходного сигнала
- Абсолютные энкодеры
- Тип датчика
- Однооборотные
- Многооборотные.
- Код
- Двоичный
- Грея.
- Тип выходного сигнала
- Синусно-косинусный (резольверы)
- Параллельный
- SSI
- DRIVE-CLiQ
- RS-422 (TTL)
- EnDat
- HIPERFACE
- PROFIBUS DP
- DeviceNet
- CANOpen.
- Тип датчика
- Окружающая среда
- Диапазон рабочих температур
- Степень защиты корпуса
- Класс взрывозащиты.
- Ограничения
- Максимальная рабочая скорость
- Длина кабеля.
Датчики угла наклона (инклинометры)
Источник — http://rusautomation.ru/inkrementalnyy_enkoder
Источник — http://electrosam.ru/glavnaja/slabotochnye-seti/oborudovanie/enkodery/
Источник — http://f-enco.ru/blog/tekhnologii/inkrementalnye-enkodery/
Источник — http://www.mtru.ru/articles/incremental-encoder.html
Источник — http://electricalschool.info/spravochnik/apparaty/1765-jenkodery-datchiki-ugla-povorota.html
Источник — http://ua.automation.com/content/osnovy-inkrementalnyj-ili-absoljutnyj-datchik-polozhenija
Источник — http://stl-grupp.com/ru/info/what-is-encoder.html
Источник — http://www.celeramotion.com/zettlex/ru/%D0%BF%D0%BE%D0%B4%D0%B4%D0%B5%D1%80%D0%B6%D0%BA%D0%B0/t%D0%B5%D1%85%D0%BD%D0%B8%D1%87%D0%B5%D1%81%D0%BA%D0%B8%D0%B5-%D0%B4%D0%BE%D0%BA%D1%83%D0%BC%D0%B5%D0%BD%D1%82%D1%8B/%D0%B8%D0%BD%D0%BA%D1%80%D0%B5%D0%BC%D0%B5%D0%BD%D1%82%D0%B0%D0%BB%D1%8C%D0%BD%D1%8B%D0%B5-%D0%B8%D0%BB%D0%B8-%D0%B0%D0%B1%D1%81%D0%BE%D0%BB%D1%8E%D1%82%D0%BD%D1%8B%D0%B5-%D0%B4%D0%B0%D1%82%D1%87/
Источник — http://codius.ru/articles/%D0%98%D0%BD%D0%BA%D1%80%D0%B5%D0%BC%D0%B5%D0%BD%D1%82%D0%B0%D0%BB%D1%8C%D0%BD%D1%8B%D0%B9_%D1%8D%D0%BD%D0%BA%D0%BE%D0%B4%D0%B5%D1%80_%D0%BF%D1%80%D0%B8%D0%BD%D1%86%D0%B8%D0%BF_%D0%B4%D0%B5%D0%B9%D1%81%D1%82%D0%B2%D0%B8%D1%8F_%D1%81%D1%85%D0%B5%D0%BC%D1%8B_%D0%BF%D0%BE%D0%B4%D0%BA%D0%BB%D1%8E%D1%87%D0%B5%D0%BD%D0%B8%D1%8F_%D1%80%D0%B0%D0%B1%D0%BE%D1%82%D0%B0_%D1%81_Arduino
Источник — http://www.maxplant.ru/article/encoder.php